
虹科案例
【虹科案例】每年節省200萬元的品質損失!海信日立如何用MSR振動記錄儀發現大型設備運輸隱憂?
虹科MSR衝擊振動記錄器可為物流運輸、軌道運輸、電力能源、工業自動化等領域提供高精度、可靠的衝擊振動監測解決方案。透過引入虹科MSR165衝擊微型振動記錄儀,海信日立成功建構了一套科學的數據監測體系,實現了對設備運輸環境的精準量化與產品設計的持續優化。

Lorem ipsum dolor sit amet, consectetur adipiscing elit.Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
Lorem ipsum dolor sit amet, consectetur adipiscing elit.Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
在自動駕駛技術飛速發展的當下,高精度與高保真的仿真場景構建成為核心關鍵。3D Gaussian Splatting (3DGS)憑藉高效渲染與逼真場景還原能力,逐步成為三維重建與仿真領域的焦點。然而在實際應用中,如何將多源異構數據高效轉化為可用的 3DGS 場景,並確保其與真實環境的一致性,仍是行業痛點。
針對 3DGS 落地自動駕駛仿真的挑戰,虹科 aiSim 方案構建了從原始數據標準化到高保真仿真驗證的完整閉環流程:透過 aiData 工具鏈 實現多源數據協同;藉演算法組合保障場景高度逼真;以 GGSR 渲染器 達成「高效 + 真實」的渲染閉環;並可自由配置暴雨、夜晚等極端環境,模擬多模態感測器、虛擬交通流,覆蓋自動駕駛的各種極端測試工況。
3DGS 是一種基於 三維高斯分佈(3D Gaussian Distribution) 的場景表示方式,其核心理念是將場景中每個物體轉換為多個 3D 高斯點。每個高斯點猶如一個「資料膠囊」,承載位置、協方差矩陣與不透明度等關鍵資訊,用以精準描繪場景的幾何輪廓與光照特性。
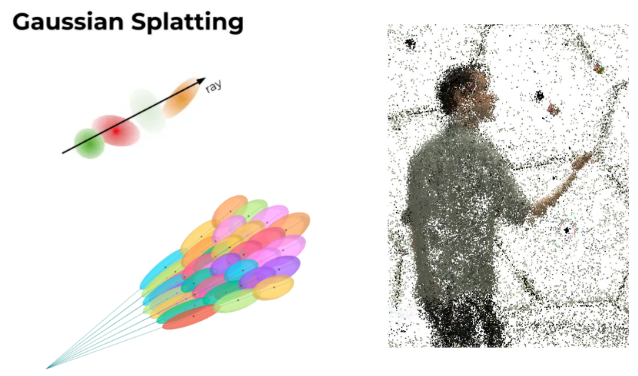
離散分佈的高斯點(左) → 多個高斯點構成的三維世界(右)
從流程上看,3DGS 首先利用 SfM(Structure from Motion) 進行資料預處理。該技術通過多視角影像分析,校正相機位置並恢復其內外參數,生成稀疏點雲作為後續場景構建的基礎。基於這些點雲,系統初始化一組 3D 高斯點,設定位置、協方差矩陣與不透明度等初始值。

3DGS 流程示意
在訓練階段,3DGS 會持續優化高斯點的位置、形狀與透明度,並創新性地採用自適應密度控制策略。每次反向傳播後會自動移除對場景貢獻度低的高斯點,並根據細節需求對關鍵點進行分裂或克隆,以兼顧效率與細節表達。
與傳統 NeRF (Neural Radiance Fields) 相比,3DGS 展現出明顯優勢。NeRF 雖能生成具真實感的連續三維場景,實現空間座標到顏色與密度的映射,但其計算量極大,單一場景的訓練往往需耗費大量算力與時間,尤其在高解析輸出時更為明顯。
此外,NeRF 的可編輯性有限,任何場景編輯都需重新訓練全流程;而 3DGS 藉由顯式建模,成功避開神經網絡高負載的訓練開銷,使訓練與渲染速度大幅提升。3D 高斯點能捕捉場景細節,實現高精度重建並支援即時渲染。
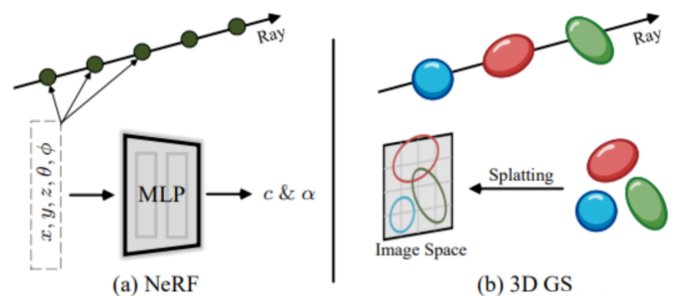
NeRF 與 3DGS 實現流程比較
然而 3DGS 亦非完美。在極度複雜的三維場景下,為呈現每一細節可能需大量高斯點,導致運算與記憶體負擔提升。目前 3DGS 多應用於靜態重建,如何高效處理動態場景並準確追蹤物體的形狀與運動軌跡,仍是科研與工程挑戰。
以多源感測器數據為起點,透過相機、雷射雷達(LiDAR)、車載運動感測器捕獲真實道路影像、點雲與位姿資料。面對不同格式、精度與時間戳的異構問題,aiData 工具鏈 可標準化轉換第三方資料,使點雲、影像與標定信息統一協作,確保後續處理精準執行。
包含 3D 自動標註、2D 語義分割、相機位姿優化 三部分:
基於清洗後的高品質數據,aiSim 啟動神經網絡重建流程:融合 NeRF 的幾何泛化能力與 3DGS 的即時渲染特性,構建 T-S 跨模態結構,將 NeRF 學得的深度、法線、外觀等監督訊號,透過多模態協同訓練(引入 LiDAR 深度約束),遷移至 3DGS 的高斯參數優化中。最終,離散的點雲與影像被轉化為連續的 3D 高斯場景,實現「真實場景 → 數位孿生」的高效映射。
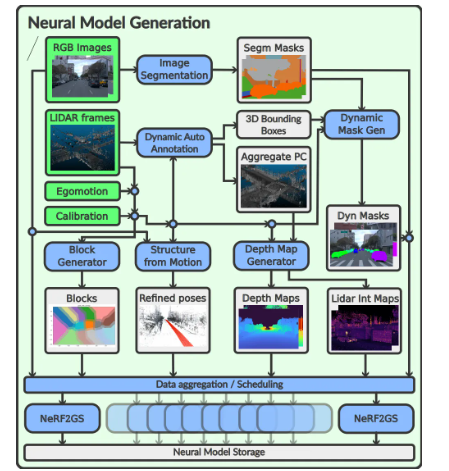
場景重建模型示意圖
T-S 結構充當關鍵橋樑,使 NeRF 所學的深度與外觀訊號可順利注入 3DGS。結合 LiDAR 深度約束,進一步提升幾何精度,使高斯點位置與協方差矩陣優化後能高度貼合真實場景。
經此流程,離散的點雲與影像數據被轉化為連續逼真的 3D 高斯場景,為後續場景編輯與仿真奠定可靠基礎。
為驗證重建準確性,aiSim 引入 DEVIANT 與 Mask2Former 雙演算法校驗。DEVIANT 聚焦幾何精度,模擬單目 3D 檢測邏輯,檢測場景中車輛與行人深度、位置、尺寸是否一致,避免目標漂移變形。
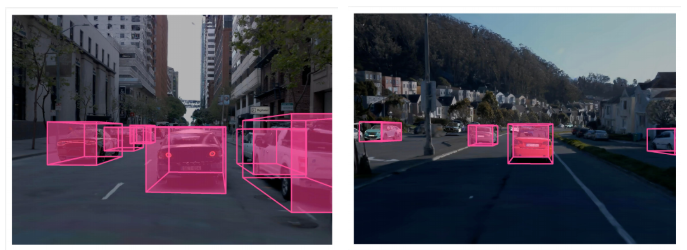
基於 DEVIANT 演算法的 3D 目標檢測驗證
結果顯示模型能成功識別重建車輛,且未出現明顯領域偏差;遠距離未檢測出是模型範圍限制所致。
Mask2Former 則聚焦像素一致性,將重建渲染圖與真實影像進行語義分割比對,約束局部特徵提取以校驗紋理與邊界一致度。

基於 Mask2Former 測量合成與真實資料之差異
綜合結果顯示,aiSim 的 3DGS 重建在幾何、紋理與語義層面均與真實環境高度契合,實現「形神兼備」,為自動駕駛測試提供可信仿真基礎。
aiSim 場景編輯工具 提供強大定制能力:可在 3DGS 基礎場景上靈活添加虛擬交通流,設定車輛路線、速度與密度,模擬城市或高速場景;同時支援暴雨、暴雪、夜間照明等極端氣候,以提升測試真實度。
部署多模態感測器,可模擬不同傳感器於各環境的輸出行為,全面測試自動駕駛對多源數據的融合能力,拓展單一場景的應用價值。
GGSR(General Gaussian Splatting Renderer) 為高保真渲染核心,針對廣角鏡頭失真進行深度優化,確保 FOV 較大時仍具高一致性與清晰度,並減少偽影。同時支援任意相機畸變模型,精確模擬色彩、亮度、對比與畸變校正,使仿真資料更貼近真實感測器輸出。依託共用射線-高斯交互邏輯,可準確模擬雷射反射與碰撞行為,實現從數據採集到仿真驗證的完整閉環。
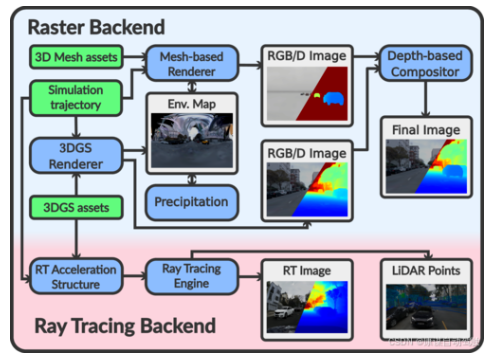
渲染管線概述
虹科 aiSim 3DGS 方案以全流程技術創新構建「數據標準化 – 場景高保真 – 仿真全覆蓋」的價值閉環,實現 3DGS 由技術潛力到工程實用的落地轉化。
在痛點解決上,aiData 工具鏈協同多源數據,克服 3DGS 輸入碎片化問題;T-S 結構融合 NeRF 與 3DGS 優勢並結合 LiDAR 深度約束,達成精準幾何與外觀重建;DEVIANT 與 Mask2Former 雙重驗證確保重建場景與真實環境一致;GGSR 渲染器則兼顧高效與高保真,滿足自動駕駛仿真的嚴苛需求。
在應用價值上,該方案實現從真實場景至數位孿生的高效映射,並支援極端氣候、虛擬交通流與多模態感測器靈活配置,使單一場景可延展為多樣測試工況。
此 「數據–場景–測試」閉環能力 不僅降低實路測試依賴,也為自動駕駛演算法迭代提供高可信度的仿真環境。
虹科MSR衝擊振動記錄器可為物流運輸、軌道運輸、電力能源、工業自動化等領域提供高精度、可靠的衝擊振動監測解決方案。透過引入虹科MSR165衝擊微型振動記錄儀,海信日立成功建構了一套科學的數據監測體系,實現了對設備運輸環境的精準量化與產品設計的持續優化。
虹科 PCAN Router 提供 CAN / CAN FD 通訊橋接解決方案,支援跨 EE 架構信號轉換,無需修改 ECU 軟件即可完成 POC 驗證與測試整合,適用於汽車電子、自動駕駛與車載系統開發。

虹科高保真 HIL(Hardware-in-the-Loop)仿真解決方案,以 aiSim 模擬平台為核心,支援 L3/L4 自動駕駛測試、多傳感器仿真與 SiL/MiL/HiL 驗證,提供高置信度智能駕駛測試環境,適用於 OEM、Tier1 及自動駕駛科技企業。
