ADTF
——專為開發高級駕駛輔助系統(ADAS)和自動駕駛系統的全面軟件框架
功能介紹
全面解決方案
ADTF為ADAS和自動駕駛系統提供了一個全面的開發解決方案,包括快速原型設計、仿真、數據記錄和驗證等關鍵功能。
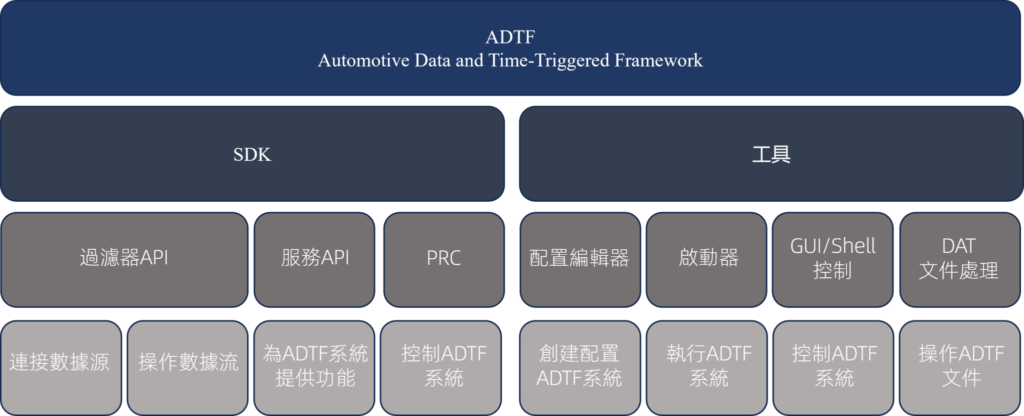
模塊化架構
ADTF采用模塊化架構,使開發人員能夠輕松地集成和重用軟件組件,同時支持即插即用的軟件,使其適用於各種硬件配置。
數據記錄和回放
ADTF可以記錄各種數據流,包括傳感器數據和通信數據,以便後續的數據分析和回放,有助於系統驗證和改進
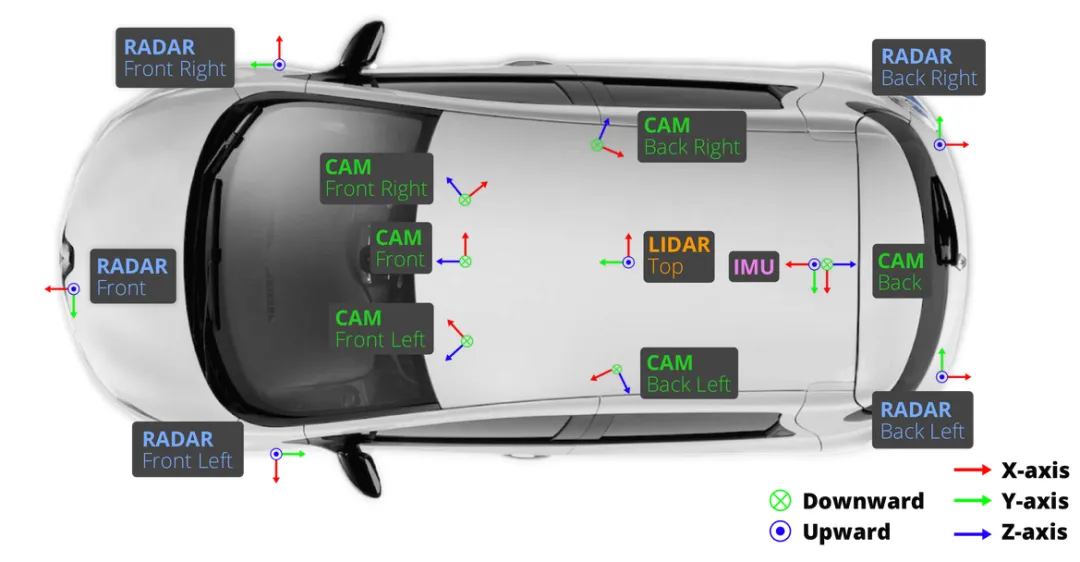
環境感知和車輛狀態估計
ADTF具備處理各種傳感器數據的能力,實現精確的環境感知和車輛狀態估計,是開發ADAS功能的重要工具
實時監測和分析
ADTF提供強大的實時監測、分析和記錄功能,幫助開發人員評估系統性能並進行算法調試,確保系統的可靠性和穩定性
快速原型制作
ADTF使開發人員能夠快速原型設計和測試ADAS功能,加速開發周期,從概念到實際應用的叠代更加高效
標準化支持
ADTF支持多種汽車標準,如CAN、CAN FD、FlexRay、XCP、Some/IP、汽車以太網/AUTOSAR等,確保與汽車電子系統的互操作
可擴展性
ADTF具有高度的可擴展性,開發人員可以根據特定需求添加新的功能模塊和算法,使其適應不斷變化的開發要求
多平台支持
ADTF可在不同的平台上運行,包括x64和ARM64,並支持多個操作系統,如Linux和Windows,使其更具靈活性。
ADTF架構
推薦軟件版本 ≥ ADTF3.14.0
ADTF軟件功能
- 使用的工具和 adtfplugins 的組合(無頭,UI)
- 直播、回放(實時或更快)或錄制模式(流數量、多個錄制器等)
- 獨立使用 ADTF Launcher,與第三方工具或多個實例/分布式設置一起使用
- 裸機、桌面、docker、雲或虛擬映像
adtfgraph 中組件的組合、求和和嵌套
加載的元 (xml) 文件中數據結構的計數和嵌套 - 處理樣本的數據大小、數量和速率
- 請求處理和解碼的子流數量
- 單線程或多線程播放
- CPU/核心/線程關聯依賴庫
- 設備的延遲、可用隊列和緩沖區
- 讀寫 I/O 流量
- 用於 UI 算法和操作的 GPU
硬件要求
- 支持要安裝的所需軟件依賴項的硬件設置
- 至少一個單核處理器或 1GHz 的 SoC
- 至少 2GB RAM 用於基本使用工具和基本非嵌套圖形,其中包含基本交付中的標準組件
顯示
• 使用全高清(推薦分辨率)的顯示器
支持平台(推薦)
• 支持平台:支持其他發行版(例如Fedora,Debian)
參考硬件是nVidia Jetson TX2板(兼容例如nVidia Drive PX 2或 Jetson AGX XAVIER)
• 要求:
1、gcc≥ 7
2、libc ≥ 2.27
3、libstdc++ ≥ 6.0.25
4、CMake ≥ 3.23.2
5、build-essential libarchive-dev
mesa-common-dev mesa-utils
libglib2.0-0
• ADTF delivery package的可用磁盤空間:4GB
• 支持平台:支持其他發行版(例如Fedora,Debian)
• 要求:
1、gcc ≥ 7
2、libc ≥ 2.27
3、libstdc++ ≥ 6.0.25
4、CMake ≥ 3.23.2
5、build-essential libarchive-dev
mesa-common-dev mesa-utils
libglib2.0-0 libxcb-xinerama0
xterm
• ADTF delivery package的可用磁盤空間:6GB
• 支持平台:支持其他发行版(例如
Fedora,Debian)
参考硬件是nVidia Jetson TX2
板(兼容例如nVidia Drive PX 2
或 Jetson AGX XAVIER)
• 要求:1、gcc≥ 7
2、libc ≥ 2.27
3、libstdc++ ≥ 6.0.25
4、CMake ≥ 3.23.2
5、build-essential libarchive-dev
mesa-common-dev mesa-utils
libglib2.0-0
• ADTF delivery package的可用磁盘空
间:4GB
系統開發應用
快速模型設計
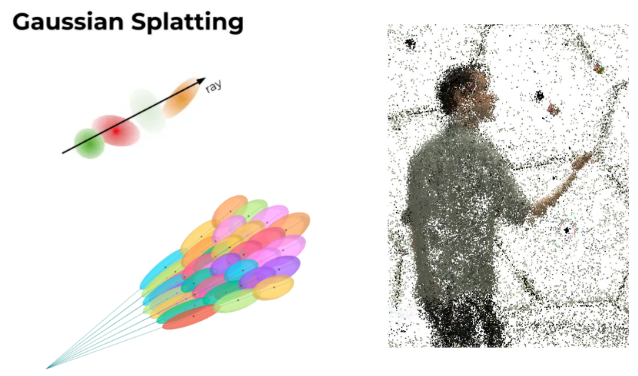
ADTF可開發一個用於可視化傳感器和相機數據的系統。該系統通過ADTF的功能連接和可視化相機數據、信號和調試信息。開發人員可以使用該系統驗證ADAS/AD功能的開發。
例如,使用ADTF提供的2D和3D可視化功能來查看車道檢測算法或乘客識別功能的可靠性。
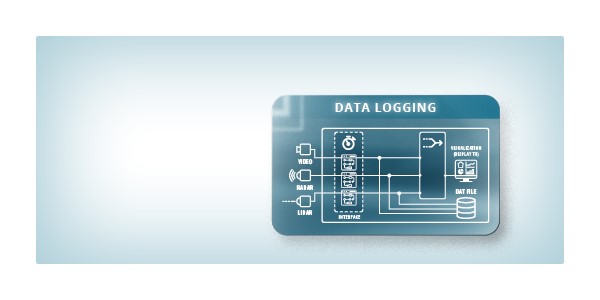
數據記錄
支持原始設備制造商(OEM)的測量技術開發利用ADTF作為中心單元,集成和擴展工具方便訪問、解碼、處理和可視化傳感器數據、總線數據和調試接口記錄原始數據流,用於後續離線分析和實驗重現。
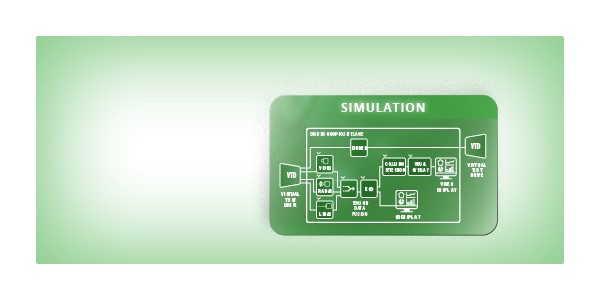
模擬
ADTF軟件支持AUTOSAR軟件組件的集成和測試。開發了AUTOSAR輔助工具,利用其為測試AUTOSAR軟件組件提供解決方案。可以直接通過ADTF訪問和測試這些組件,而無需進行覆雜的殘留總線模擬。
後處理
可實現高度可擴展的數據驗證通過。框架鏈接不同的工具或搭建數據流進行數據分析和驗證。提供豐富的應用程序、服務和接口適應各種不同的數據處理需求,並在車載資源上高效運行。