虹科案例
【虹科方案】 SimData高保真虛擬數據集方案:基於aiSim的自動駕駛感知訓練
虹科推出SimData高保真虛擬數據集,依託aiSim仿真平台,完美兼容nuScenes格式。為自動駕駛感知算法、LiDAR、BEV模型提供高質量多模態訓練數據,有效解決極端場景(Edge Cases)採集難題。立即點擊了解構建流程與實測效果!

Lorem ipsum dolor sit amet, consectetur adipiscing elit.Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
Lorem ipsum dolor sit amet, consectetur adipiscing elit.Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
在放射治療(放療)領域,毫米級的微小誤差可能意味著健康組織受到損傷或腫瘤部位漏照。隨著放療技術日益精進,臨床上對患者體位驗證與即時監控的需求已達到前所未有的高度。傳統的光學表面成像系統在精度、抗干擾能力及複雜曲面適應性方面正面臨重重挑戰。本文將深入探討虹科(HongKe)基於高精度雙目散斑 3D 相機的視覺定位系統,如何革新放療定位流程,全面提升癌症治療的安全行與有效性。
放射治療(放療)的核心目標,是將高劑量輻射精準投照至腫瘤區域,同時最大限度地保護周圍的正常組織。然而,在精準放療的實際流程中,患者的體位管理成為了關鍵瓶頸:
不良後果: 體位偏差會導致輻射劑量分佈偏離原定計劃,進而降低腫瘤控制率,或顯著增加正常組織引發併發症的風險。
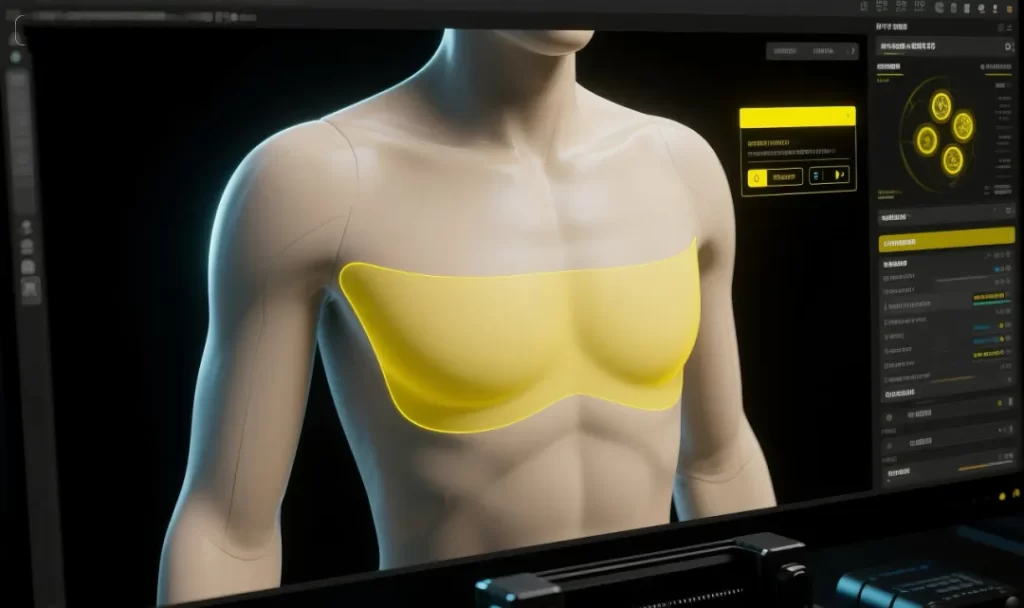
雙目散斑 3D 相機技術憑藉其獨特的成像原理,成為解決放療定位痛點的理想方案。虹科(HongKe)該方案的核心工作流程為:主動向目標區域投射高密度、高對比度的激光散斑圖案,兩個經過高精度標定的相機從不同角度同步捕捉被物體表面調製後的散斑圖像。最後,系統基於三角測量原理及先進的立體匹配演算法(利用散斑圖案的唯一性特徵),快速運算並生成物體表面高密度的三維點雲座標。

基於雙目散斑 3D 相機的放射治療視覺定位系統架構清晰。硬體核心為高精度雙目散斑 3D 相機模組,通常安裝在治療床兩側或上方的機架上,其視野需完整覆蓋患者的治療區域。關鍵性能指標包括精度、解像度、視野範圍 (FOV)、工作距離及幀率。設備需具備防撞、抗輻射(或易於屏蔽)的安全設計,以便安全地整合於放療機房環境中,並由高性能計算單元負責即時數據處理。
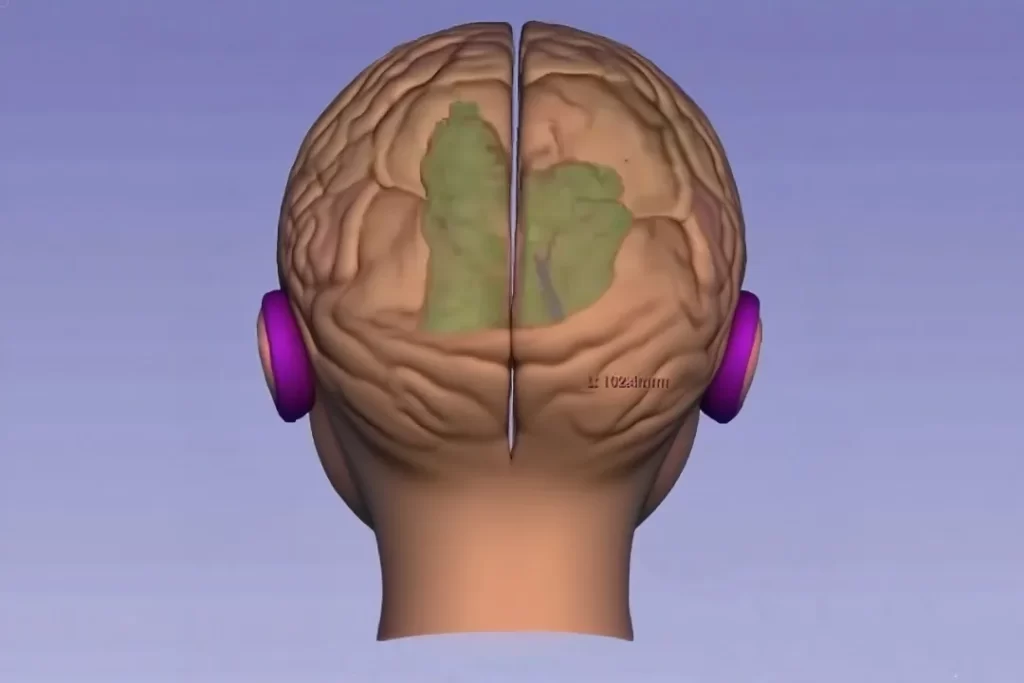
在軟件層面,核心的點雲配準演算法首先進行剛性配準,精確計算出當前患者體表點雲與計劃 CT 影像外表面所提取的參考點雲(或首次治療時建立的參考表面模型)之間的最佳空間變換(包括平移與旋轉偏差),這是實現「計劃體位」精準復現的基礎。
針對更高級的臨床應用,系統可採用形變配準技術,用以處理因呼吸、器官運動或體重變化導致的非剛性形變,從而提供更精細的位移場資訊。系統界面能直觀顯示患者當前位置相對於參考位置的平移(ΔX, ΔY, ΔZ)和旋轉(Roll, Pitch, Yaw)偏差。
此外,安全監控與警報功能支援設定特定的位移閾值,即時監控治療過程中患者的任何移動。一旦檢測到位移超過安全閾值,系統將立即觸發聲光警報,並向加速器控制系統發送訊號以暫停射線照射。數據管理與報告模組則會自動記錄每次治療前的擺位誤差數據、治療中的運動軌跡,並生成標準化的質量控制(QC)報告,為醫療團隊的持續改進提供客觀依據。

某大型腫瘤醫院放療中心引入了基於雙目散斑 3D 相機的視覺定位系統(核心相機參數:精度 ±0.1mm @1m,FOV 900x866mm @1m),並成功應用於鼻咽癌調強放射治療(IMRT)患者的體位管理中。
高精度雙目散斑 3D 相機技術為放射治療領域提供了一套革命性的體表定位與監控方案。該技術融合了非接觸、亞毫米級高精度、強抗干擾能力、全場高速動態測量等核心優勢,有效突破了傳統方法在精度、效率和可靠性上的瓶頸。
透過深度整合於放療的全流程,虹科(HongKe)的這套系統不僅大幅提升了初始擺位的精確度與執行效率,更透過即時動態監控為患者的治療安全構築了堅實防線,同時為醫療機構積累了寶貴的客觀量化質控數據。
隨著醫療技術的持續演進,以及其與自適應放射治療(ART)、人工智能(AI)等前沿領域的協同創新,基於雙目散斑 3D 相機的視覺定位系統必將成為精準放療體系中不可或缺的核心支柱,為提升癌症治療效果和改善患者生存質量貢獻關鍵力量。
虹科推出SimData高保真虛擬數據集,依託aiSim仿真平台,完美兼容nuScenes格式。為自動駕駛感知算法、LiDAR、BEV模型提供高質量多模態訓練數據,有效解決極端場景(Edge Cases)採集難題。立即點擊了解構建流程與實測效果!

如何為醫藥冷鏈選擇合適的溫度數據記錄儀?本文深度對比一次性與多次使用(可重複)Data Logger 的優缺點,結合 GMP/GDP 合規標準,助香港與東南亞藥企與物流商優化供應鏈溫控管理,降低出海合規風險。點擊了解專家選型方案!

虹科攜手中華電信導入 Vuzix M400 企業級 AR 智能眼鏡,助攻偏遠地區遠程醫療升級!透過「第一視角」與免提協作打破地域限制,為 B2B 醫療機構、照護單位加速數碼轉型與智慧醫療應用落地。點擊了解完整 POC 概念驗證方案。
