Hongke Case
【虹科方案】 安鵬精密實測 – NVH 路測中零開發實現 CAN 訊號同步
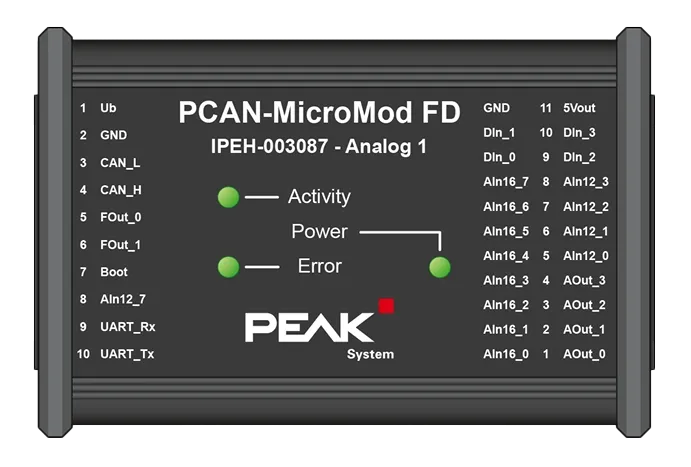
安鵬精密於實際 NVH 路測中,透過虹科 PCAN-MicroMod FD,將車輛 CAN / CAN FD 訊號即時轉換為類比電壓,無需二次開發即可完成訊號同步,低成本整合既有 NVH 資料採集系統。

Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
dSPACE, a world-renowned provider of simulation and verification solutions, has successfully constructed a GNSS-based Hardware-in-the-Loop (HIL) simulation system for driving functions. The system can be widely used in automotive scenarios such as autonomous driving, V2X, and smart cabins, and is highly flexible and versatile, making it suitable for all kinds of complex test environments.
dSPACE is a global player in the field of simulation and verification, and a pioneer in aerospace and defense innovation. Its product portfolio covers the entire development chain from conceptual design to mass production support for applications in autonomous driving, electric vehicles, motors, battery management systems, fuel cells, power electronics, charging infrastructure, and more.
dSPACE also offers a wide range of simulation models to support all stages of development, from functional development to ECU testing.

The importance of GNSS signals in autonomous driving lies in their ability to provide accurate, reliable and stable positioning information. Whether it is V2X communication or autonomous driving function verification, all core applications rely on satellite-supported positioning capabilities.
However, the availability of different GNSS systems varies greatly, and the quality of GNSS signals can be easily affected by topographical environments (e.g., urban canyons, viaducts, dense buildings). In addition, GNSS signals can be subject to unintentional interference, malicious interference, or spoofing attacks.
To ensure the robustness and reliability of the application in everyday scenarios, it is essential to rely on more powerful and stable GNSS simulators.

The whole system is mainly composed of the following parts:
In this solution, the HIL simulator can specify the 3D trajectory and related scenes, and output the position information (latitude, longitude, altitude), 3-axis velocity, 3-axis acceleration and acceleration. Attitude information such as 3-axis angular velocity can be obtained using an ASM module, and the data is transmitted in real time to the GNSS simulator, which then feeds it back to the device to be tested using RF signals.
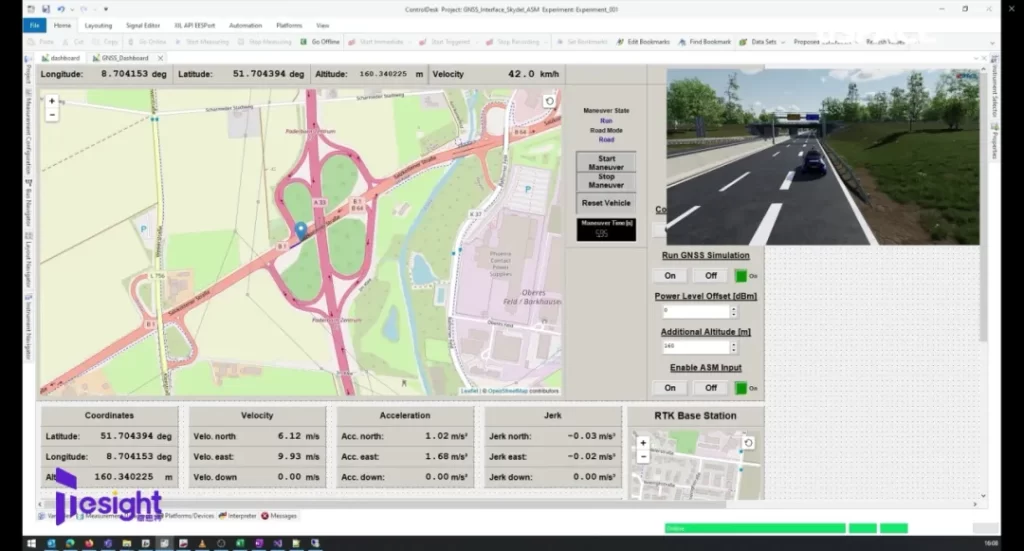
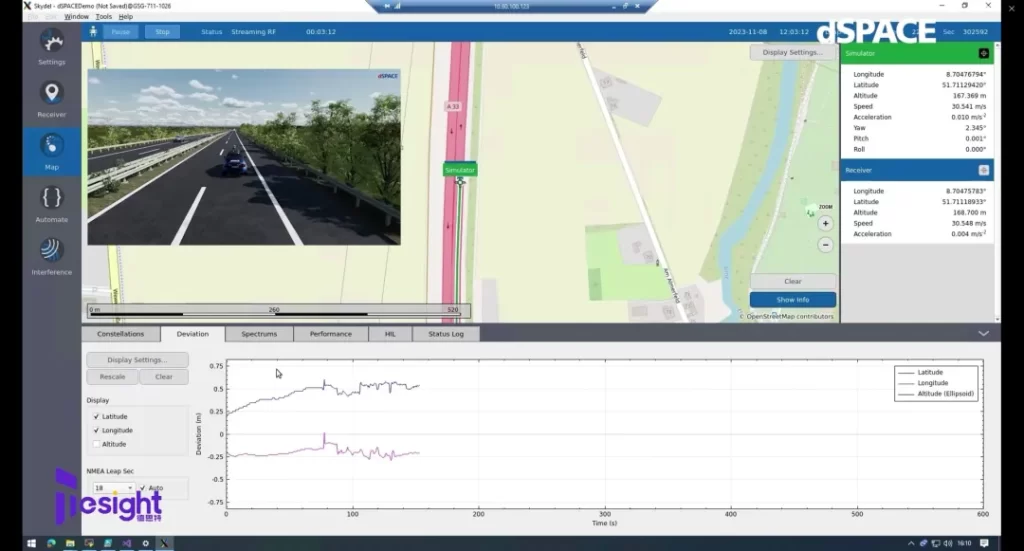
During the GNSS simulation process, you can observe the GNSS data output from the simulator and received from the device under test in real time, and you can check the positioning error and compare the performance of the simulation coordinates. By monitoring the interaction between the GNSS simulator and the DUT (Device Under Test) in real time, the performance of the positioning algorithm and GNSS modules in different environments can be more accurately evaluated.
In this way, the GNSS module can be fully integrated into HIL's 3D simulation scenarios, enabling it to perform a wide range of complex environmental and operational tests in a laboratory environment. The ability to simulate a wide range of road conditions and environmental changes without the need for extensive on-road measurements dramatically improves testing efficiency, while providing more quantifiable data for performance optimization and algorithm adjustment.
The GNSS simulator enables highly accurate geolocation simulation and satellite signal generation. When the GNSS signal generator is integrated into the dSPACE ASM model, the system automatically selects the default GNSS test scene and controls the signal generator.
In a typical autonomous driving test, the starting position, date, driving route and driving maneuvers can be parameterized in the ASM model, and various GNSS constellations (GPS, Galileo, GLONASS, BeiDou, etc.) and signal degradation modes can be selected. the HIL simulator continuously transmits the vehicle position data to the signal generator, which generates a simulated signal based on the scene and outputs it as a real RF signal to the GNSS device to be tested. The HIL simulator continuously transmits the vehicle position data to the signal generator, which generates a simulated signal based on the scene and outputs it to the GNSS device to be tested in the form of a real RF signal.
Through this complete process, the positioning status, error behavior and performance limits of GNSS modules in various complex scenarios can be completely reconstructed, effectively supporting the rapid verification of autonomous driving perception and positioning tests.
安鵬精密於實際 NVH 路測中,透過虹科 PCAN-MicroMod FD,將車輛 CAN / CAN FD 訊號即時轉換為類比電壓,無需二次開發即可完成訊號同步,低成本整合既有 NVH 資料採集系統。
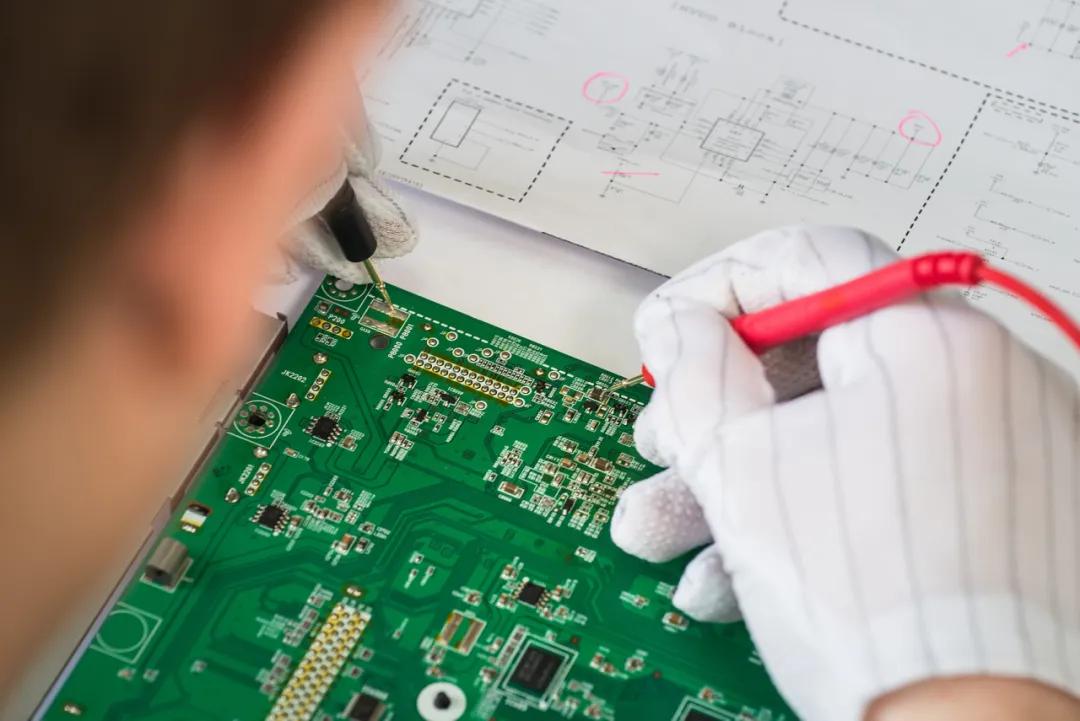
虹科結合 AR 智慧眼鏡與 AI 辨識技術,打造標準化 PCB 質檢工作流程,整合 MES、ERP、AOI 系統,降低漏檢率、提升良率,加速電子製造數位化升級。

深入解析虹科 GNSS 模擬器如何支援無人機整機測試,涵蓋多星座 GNSS 仿真、RTK 公分級定位、抗干擾測試與多感測器融合驗證,助力高效、安全的 UAV 研發。
