- Home
- Technical Products
Enterprise Cloud IT Solutions
Test Measurement
Industrial Measurement
- Solutions
Enterprise Cloud IT Solutions
Test Measurement
- Latest Articles
- About Us
 EN
EN
Real-Time Kinematic (RTK) is a high-precision positioning technique that corrects for common GNSS errors through differential measurements.
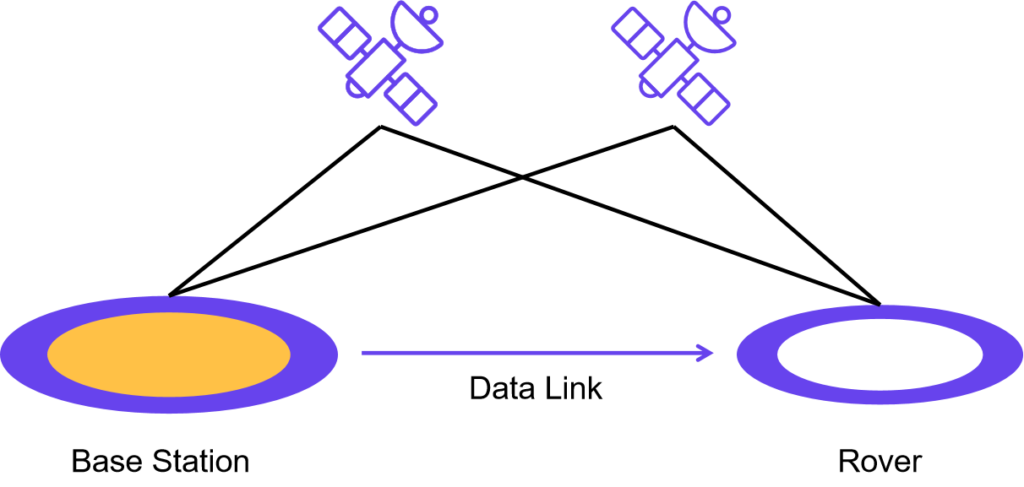
RTK systems usually consist of a Base Station and one or more Rover stations:
RTK technology can achieve centimeter-level positioning accuracy and is widely used in scenarios such as autonomous driving, surveying and mapping, and high-precision navigation.
The HONGKEI GNSS simulator supports RTK testing in a single device, eliminating the need to deploy an additional physical base station. Based on the Safran Skydel GNSS simulation engine, the system can simulate both base and rover stations in the same platform, generate corresponding GNSS signals and differential data, and complete RTK positioning performance testing and verification. It can be used for evaluation:
The Skydel simulator offers an innovative MULTI feature that allows multiple independent simulations to be run simultaneously on a single device. Each case can be independently configured with GNSS scenes and parameters and run simultaneously under the same time base, enabling simultaneous testing of multiple receivers/multi-vehicles/multi-antenna systems, simultaneous RTK Base + Rover simulations, and parallel testing of multiple scenes and comparative analysis. This feature significantly reduces the need for test equipment and improves test efficiency and consistency.
HONGKE GNSS simulator supports two RTK test implementations, which can be flexibly selected according to different test requirements:
Differential data injection based on RTCM plug-in; Dual RF synchronous simulation based on MULTI.

With the RTCM plug-in function, virtual RTCM differential data (supporting serial or Ethernet) can be injected into the mobile station. The RTCM differential data can be used as the basis for RTK calculations to obtain highly accurate positioning results. Ideal for situations where a physical base station is not required, to verify RTK algorithms and positioning accuracy, and to test receivers that do not have differential data generation capability.

Skydel's multi-example function simulates a base station and a mobile station in the same device, generates two synchronized RF signals, and produces differential correction data from the base station receiver in real time. The equipment under test receives the differential data and performs RTK calculations, completely restoring the real RTK workflow. Ideal for scenarios where the base station receiver is included in a closed loop, end-to-end RTK system performance is verified, and the overall RTK communication and positioning link is tested.
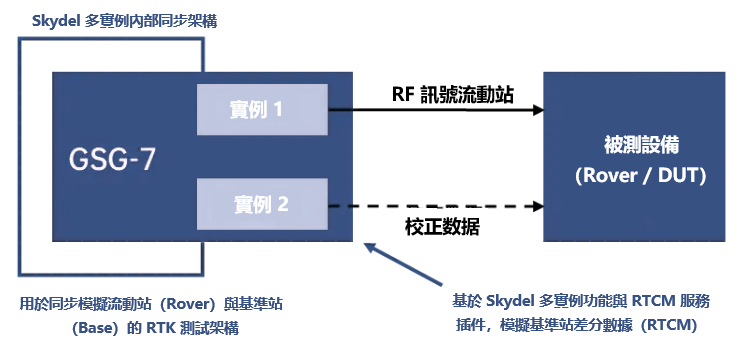
The GSG-7 / GSG-8 series can inject virtual RTCM differential data (supporting serial or Ethernet transmission) into a mobile station (Rover) via the Skydel RTCM plug-in. In this mode one instance is configured in SDR mode and outputs the GNSS analog signals (position, track, etc.) from the mobile station, while the other instance runs the RTCM plug-in (none-RT) and generates RTCM 3.x differential messages based on the configured datum position. The DUT receives the GNSS signals and differential data and performs RTK calculations to obtain highly accurate positioning results. The advantage of this method is that there is no need to generate the actual RF signal for the reference station receiver to complete the RTK test process.
The Skydel RTCM plug-in simulates RTCM 3.x differential messages from a reference station and transmits the data in real time to a mobile station receiver. The following transmission methods are supported: COM Port, NTRIP (Networked Transport of RTCM via Internet Protocol). RTCM data can be streamed through the Skydel application, and the corresponding connection method can be selected according to different test requirements.
Supported RTCM 3.x message types:
Basic Information
MSM3 (Multiple Signal Messages)
MSM7 (high-precision message)
In this test mode, the GNSS simulator outputs two independent GNSS radio frequency (RF) signals at the same time: one is used to simulate the motion trajectory of the mobile station (Rover), and the other is used to simulate the position of the base station (Base). In the system configuration, a GNSS receiver with differential capability is required as the base station, which is responsible for generating RTCM differential data in real time and transmitting it to the mobile station for RTK computation. In this way, the RTK testing process can be completed without relying on the RTCM plug-in, which is close to the actual application.
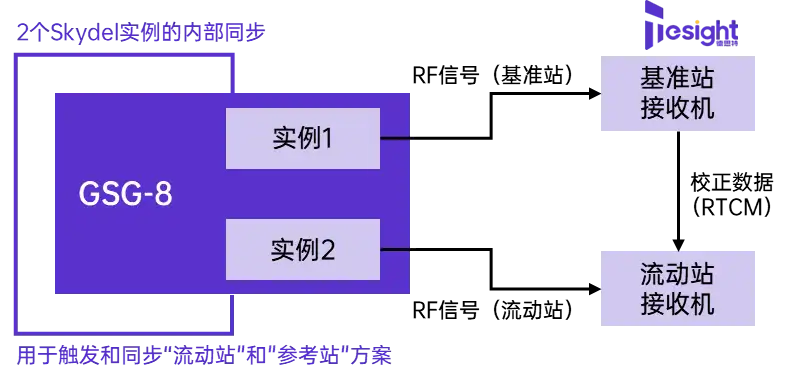
Time synchronization of two GNSS signals is a key challenge in general RTK testing. With the built-in nanosecond time synchronization mechanism, DynaSystems GNSS simulators can synchronize the triggering and alignment of the base station and mobile station signals within the device, eliminating the need for additional synchronization equipment or complex connectivity configurations. This design not only greatly reduces the difficulty of test deployment, but also provides a true reproduction of the RTCM differential data generation and transmission process, making the test results more informative.
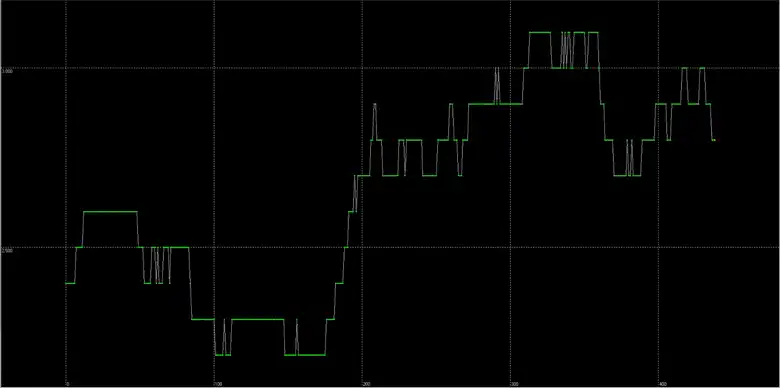
The receiver's positioning result is also difficult to stabilize at that altitude and will experience continuous drift with an elevation error of about ±1 meter.

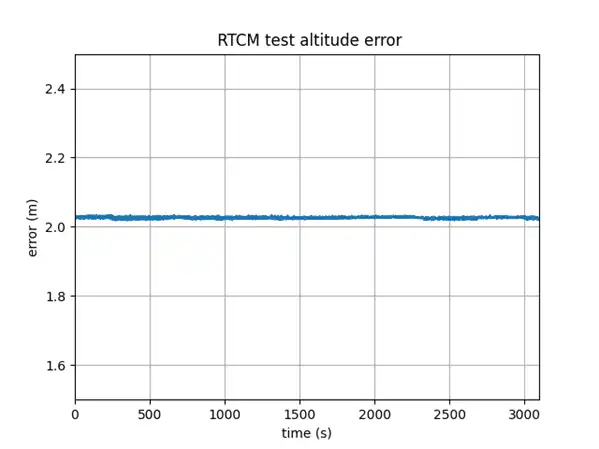
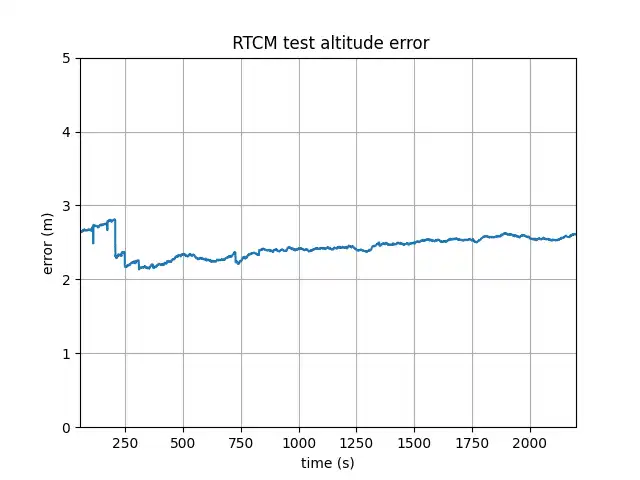
Positioning results are stabilized at the set height with a significantly reduced error of about ±1 to 2 cm.
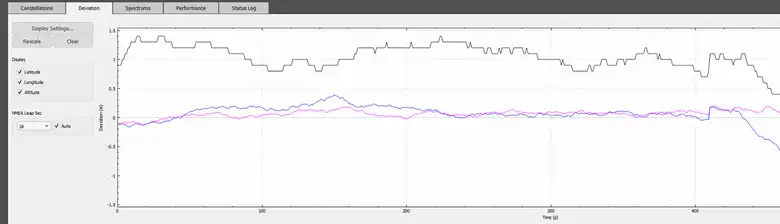
The HONGKE GNSS simulator supports real-time observation of the receiver's NMEA output and visualization of positioning errors as well as satellite signal strength and distribution within the device. Through the built-in Map interface, users can synchronize the receiver's actual position with the simulated trajectory and compare the difference between the two in real time for quick test adjustment and verification. In addition, the system also supports automated report output through plug-ins, which greatly enhances test efficiency and data analysis capabilities. This is a much more intuitive and efficient way to observe and analyze data than the traditional way of using the receiver interface or serial tools.
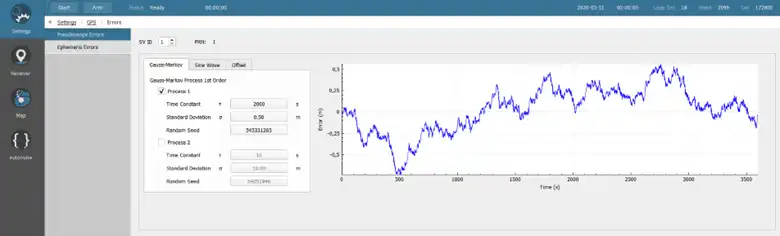
To simulate the complexity of real-world applications, HONGKE's GNSS simulators allow users to actively introduce various types of error and interference conditions, including pseudorange bias, pseudorange error, and different types of signal interference. With these features, users can reproduce inaccurate positioning scenarios in a controlled environment to fully validate the stability and immunity of GNSS receivers or RTK algorithms, and further enhance the reliability of the system in real-world applications.
HONGKE GNSS Simulation Series provides a series of GNSS turnkey solutions such as GNSS simulators and simulation software.
The GTS P7 is a Skydel-based Positioning, Navigation and Timing (PNT) test solution that provides the industry's highest standard of Global Navigation Satellite System (GNSS) signals in an easy-to-use, one-stop, compact design. Designed to provide the industry's highest standard of Global Navigation Satellite System (GNSS) signal testing in an easy-to-use, one-stop-shop, miniaturized form factor, the GTS P7 delivers high-end performance with simulation iterations up to 1000 Hz and supports up to 700 channels (number of simultaneous searches) to simulate high-dynamics, real-time synchronization, and full-field satellite signals. It supports multi-constellation and multi-frequency GNSS simulation and can be programmed to simulate all existing and future GNSS signals.
The GSG-8 Gen2 is an evolution of the GSG-8, an expert Positioning, Navigation and Timing (PNT) test solution and the latest addition to the Skydel-based simulator family. Equipped with six high-quality GNSS RF outputs and a ready-to-use merge output covering all GNSS bandwidths, the GSG-8 Gen2 offers excellent performance, supporting high simulation iteration rates up to 1000 Hz, high dynamics and real-time synchronization, as well as the ability to simulate all visible satellite signals. test and system integration projects in multi-vehicle/multi-antenna environments.
The HONGKE GNSS simulator can be flexibly selected for discrete or embedded installation in Dexter's automation standard validation tools. It provides one-click scene configuration and full-area control for the following standards, realizing standard-based validation and testing, and supporting automatic test report generation and export functions for easy archiving and documentation:
The Skydel simulation engine combines the high-end performance of a GNSS simulator with the economy and flexibility of a software-defined architecture. With a rich feature set supporting up to 1000 channels (number of simultaneous searches), 1000 Hz simulation iteration rate, remote control of user-defined scripts, and a highly scalable architecture based on software definitions, Skydel supports multiple RF channels and thousands of simulated satellite channels, and supports high-level integration and software development, providing excellent flexibility and scalability.
The Skydel Anechoic GNSS simulator allows users to accurately reproduce real-world GNSS environments in darkroom environments. With 32 independent RF outputs, the system can drive up to 16 dual-band antennas simultaneously. Revolutionary features such as automatic antenna mapping, automatic time delay calibration and automatic power loss calibration make the Skydel Anechoic one of the most advanced GNSS darkroom simulation systems on the market today.
HONGKEI is committed to providing you with a wide range of paid technical services related to this product, designed to help you succeed in your project in the most cost-effective manner. Please contact us if you need technical services related to this product!