Hongke Case
[Hongke Solutions] Hongke iDS Event Camera: High-Speed Tracking and Detection Solutions for Drones
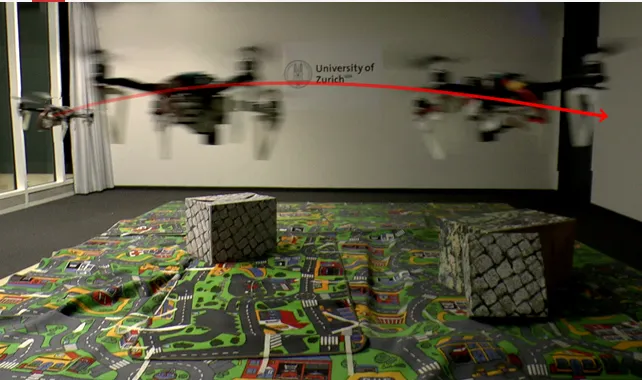
Learn more about how Hongke’s iDS event camera overcomes the motion blur and lighting limitations of traditional RGB cameras. It provides a sub-millisecond low-latency visual perception solution specifically designed for high-speed tracking by drones, low-altitude security, and obstacle avoidance in GPS-denied environments.