
虹科動態
【虹科動態】 虹科 HK-CoreTest 榮獲 OFweek 2026 優秀工業軟件獎 – 車載總線測試平台
虹科 HK-CoreTest 車載總線測試軟件榮獲維科杯·OFweek 2026「優秀工業軟件獎」。支援 CAN/CAN FD、車載以太網多協議測試、UDS 診斷與自動化閉環,助力汽車與工業設備驗證。

Lorem ipsum dolor sit amet, consectetur adipiscing elit.Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
Lorem ipsum dolor sit amet, consectetur adipiscing elit.Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
CANoe 是由德國 Vector Informatik 公司開發的一款功能強大的汽車電子系統開發與測試平台。它被廣泛應用於車載網絡(如 CAN、LIN、FlexRay、Ethernet、MOST 等)以及 ECU(電子控制單元) 的仿真、診斷、分析與自動化測試。作為當今汽車電子研發流程中的核心工具,CANoe 覆蓋了從早期設計階段到最終驗證階段的全過程。
CAPL(Communication Access Programming Language) 是 Vector CANoe / CANalyzer 專用的編程腳本語言,主要用於模擬總線節點、執行測試邏輯及處理特定事件。CAPL 由 Vector 公司自主定義,語法與 C 語言高度相似,但針對汽車通信系統的事件驅動機制進行了優化,是實現 CANoe 與汽車總線及外部設備通信的關鍵工具。
虹科 GNSS 模擬器 GTS P7 具備高性能的硬件在環(Hardware-in-the-Loop, HiL)仿真能力,提供高達 1000Hz 的仿真迭代率與低至 5ms 的超低延遲。透過標準化接口,該設備可與 Vector CANoe、aiSim 及 dSPACE 等業界主流 HiL 系統與場景仿真軟件實現高效能、低延遲的數據交互,為自動駕駛、低空經濟等前沿領域的高動態、閉環測試提供可靠的技術支撐。

虹科 GNSS 模擬器結合 CANoe 的開發方案,旨在一個易於操作、可升級且具備擴展性的平台中,提供最高標準的全球導航衛星系統(GNSS)信號測試與傳感器仿真性能。該方案利用 C++ 共享庫 創建實時饋送 Skydel 軌跡(HIL 仿真) 的 CANoe 場景,從而實現針對複雜場景與汽車應用的全方位仿真與測試。
技術提示: 在使用 CANoe 與 Skydel 進行通信前,需配置 C++ 編譯環境。在 Windows 系統中,請下載並安裝 Visual Studio 2019 及 CMake 工具。相關工具的下載與安裝指引,歡迎聯繫虹科獲取專業支援。
本方案完整演示了硬件在環(HiL)閉環測試的標準流程:
虹科 HK-CoreTest 車載總線測試軟件榮獲維科杯·OFweek 2026「優秀工業軟件獎」。支援 CAN/CAN FD、車載以太網多協議測試、UDS 診斷與自動化閉環,助力汽車與工業設備驗證。
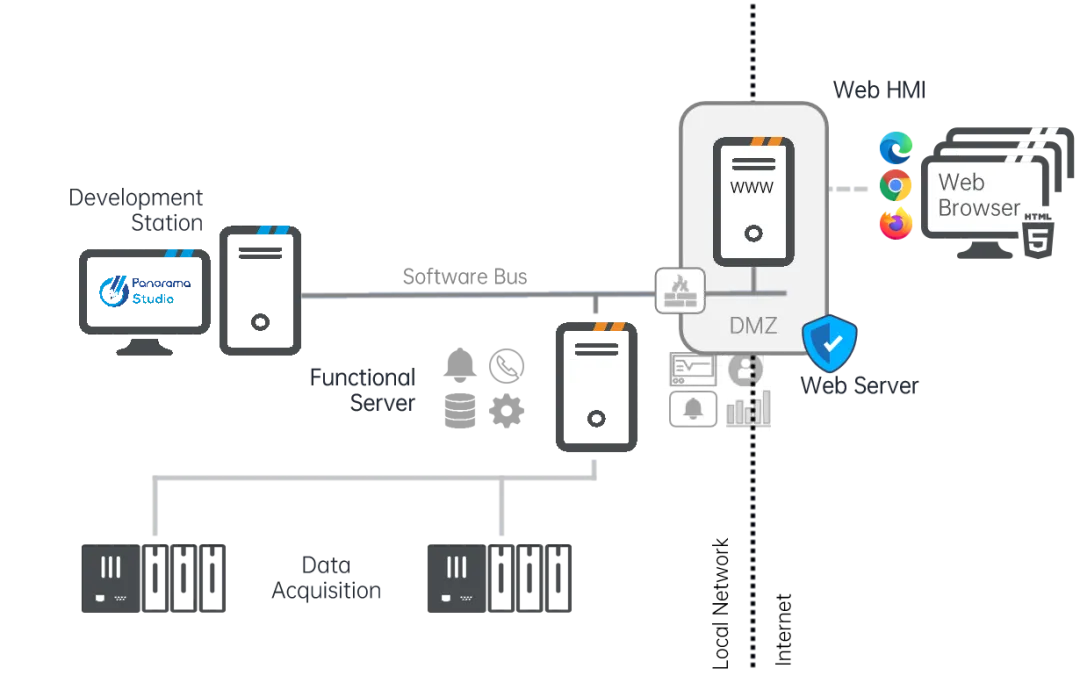
探索虹科 Panorama Essentials 輕量化 SCADA 解決方案!支援無限 Web 端存取、直觀設備狀態監控與快速部署,協助香港及東南亞企業低成本實現工業數碼化轉型與生產線升級。

CISO條例生效後,嚴重資安事故僅限12小時通報、48小時補交紀錄、14日提交報告。解析KnowBe4預警機制,透過PAB、PhishER自動化流程,將員工轉為資安預警雷達,縮短事故響應時間、滿足合規要求。
