
虹科動態
【虹科動態】 虹科 HK-CoreTest 榮獲 OFweek 2026 優秀工業軟件獎 – 車載總線測試平台
虹科 HK-CoreTest 車載總線測試軟件榮獲維科杯·OFweek 2026「優秀工業軟件獎」。支援 CAN/CAN FD、車載以太網多協議測試、UDS 診斷與自動化閉環,助力汽車與工業設備驗證。

Lorem ipsum dolor sit amet, consectetur adipiscing elit.Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
Lorem ipsum dolor sit amet, consectetur adipiscing elit.Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
本文基於虹科 GNSS 模擬器技術方案,並結合實際應用場景,展示該系統在新一代巡檢 UAV(無人機)研發中的核心價值,涵蓋導航精度、多星座兼容性、抗干擾能力及多感測器融合性能的全方位測試能力。
某無人機研發企業需完成新一代巡檢 UAV 的整機測試,測試需求包含:
測試必須驗證 UAV 在複雜環境下的:
外場測試長期受到以下因素制約:
因此難以滿足高效率、高一致性的研發需求。
為避免上述限制,企業最終採用 實驗室 GNSS 模擬測試方案,利用虹科自動化測試平台進行全場景覆蓋與高精度驗證。
GTS-P7 基於 Skydel 軟體引擎打造,提供一站式、高性能、軟體定義架構的 GNSS 信號測試能力。
主要特性包括:

Skydel 提供卓越的軟體定義靈活性:

虹科平台可與各類標準驗證工具深度整合,支援:

所有測試均於實驗室中完成,完全不需 UAV 實際飛行 → 安全可控且高度可複現
| 測試項 | 測試內容 | 測試目標 |
|---|---|---|
| 1. 靜態校準 | 模擬仰角 0°–90°、調整星座信號強度 -130 dBm 至 +20 dBm | 冷啟動定位 RMS < 1m |
| 2. 動態飛行 | 生成 S 型、急轉彎(半徑 <10m)、±5g 垂直動態 | 驗證高動態下的 DOP 穩定與航向誤差 |
| 3. 抗干擾測試 | 輸出窄帶 / 寬帶 / 脈衝干擾 | 驗證定位可用性與恢復能力 |
| 4. RTK 精度測試 | 模擬基站–移動站差分、延遲 | 驗證 RTK cm 級定位穩定性 |
✓ 多星座自由切換(GPS / BDS / GAL / GLO)
✓ 伪距精度 ≤ 1 mm
✓ 支援多種干擾信號疊加
✓ 支援偽造坐標與欺騙(spoofing)仿真
10 種典型場景一次完成
→ 外場需 10 天 → 實驗室僅需 8 小時
故障可 100% 重現
→ 支援軌跡回放與精準定位問題來源
空域申請費用 ↓ 90%
外場人力 + 設備折舊 ↓ 40%+
測試週期縮短 70% 以上
模擬山區地形 → 驗證電力線避障
測試 GNSS 丟星後 IMU 接管能力
與 5G 回傳鏈路聯合測試(<50ms)
GNSS + IMU + 視覺 SLAM 多感測器融合驗證
虹科 HK-CoreTest 車載總線測試軟件榮獲維科杯·OFweek 2026「優秀工業軟件獎」。支援 CAN/CAN FD、車載以太網多協議測試、UDS 診斷與自動化閉環,助力汽車與工業設備驗證。
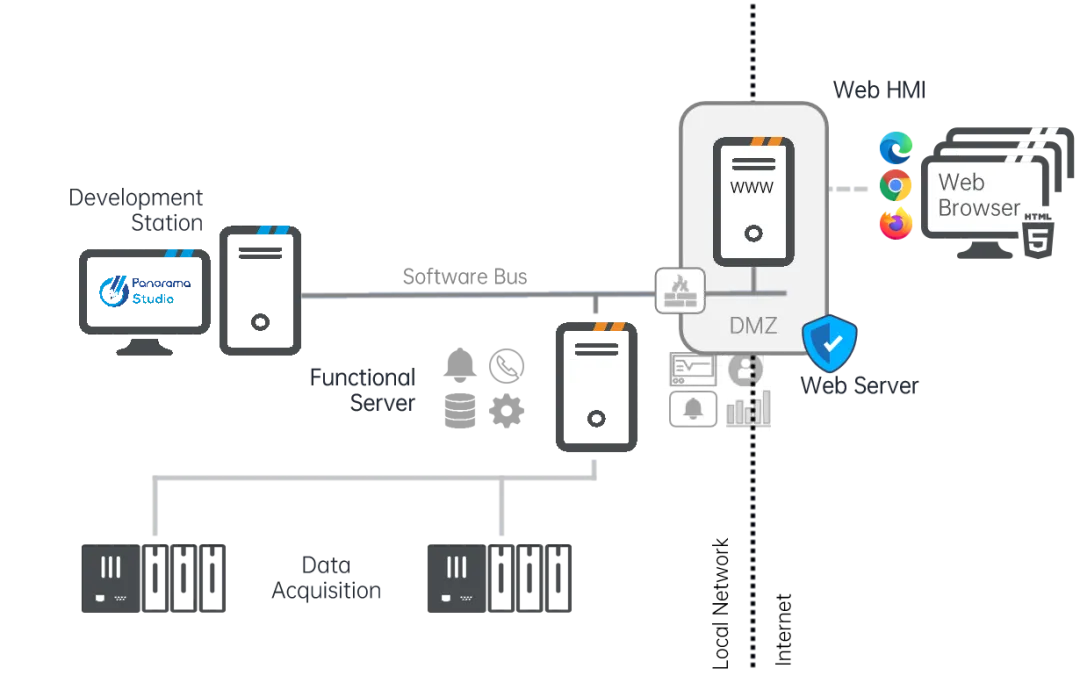
探索虹科 Panorama Essentials 輕量化 SCADA 解決方案!支援無限 Web 端存取、直觀設備狀態監控與快速部署,協助香港及東南亞企業低成本實現工業數碼化轉型與生產線升級。

CISO條例生效後,嚴重資安事故僅限12小時通報、48小時補交紀錄、14日提交報告。解析KnowBe4預警機制,透過PAB、PhishER自動化流程,將員工轉為資安預警雷達,縮短事故響應時間、滿足合規要求。
