
- Home
- Technical Products
Enterprise Cloud IT Solutions
Test Measurement
Industrial Measurement
- Solutions
Enterprise Cloud IT Solutions
Test Measurement
- Latest Articles
- About Us
 EN
EN
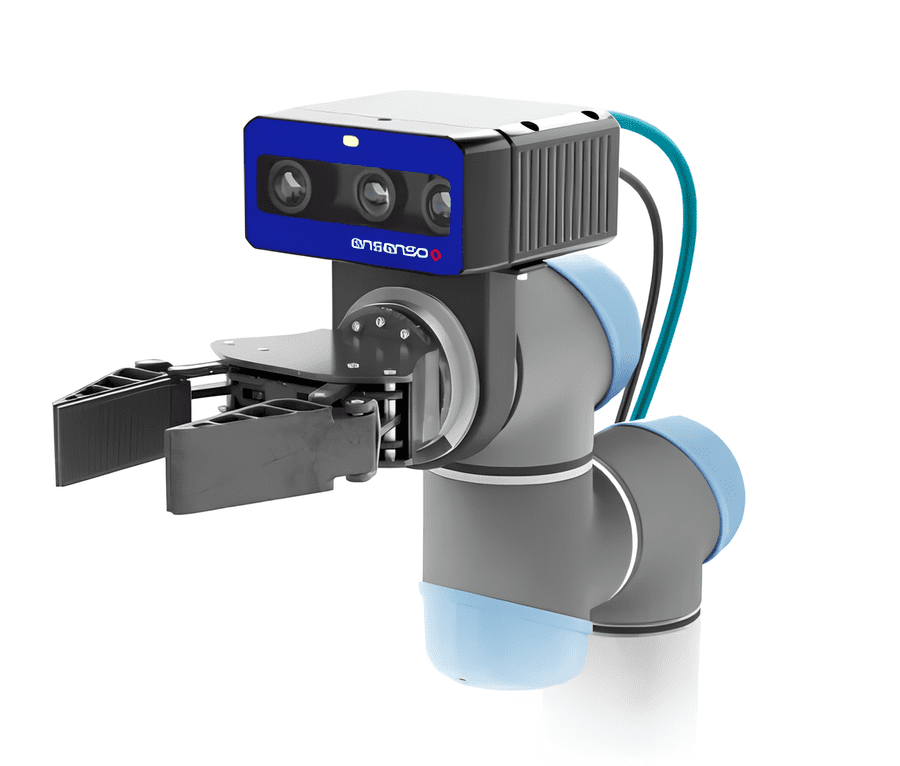
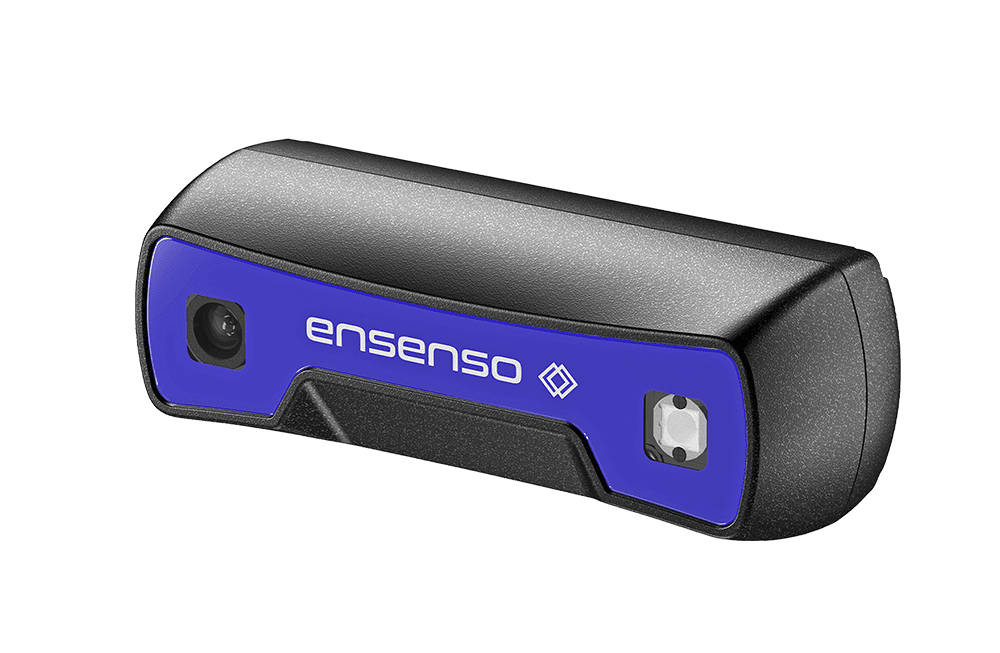
Close-Up 3D Stereo Industrial Camera - Ideal for Highly Accurate and Reliable 3D Vision Applications in Tight Spaces
The Ensenso B-Series 3D stereo vision camera system features a high-brightness pattern projector in a compact housing. With its small baseline (75 mm between stereo cameras), the optical system of the B-Series allows for very short focusing distances and large depth of field, allowing for a wide range of different operations at close distances of up to 21 centimeters, and is "plug-and-play" due to the fully integrated design of the pre-calibrated components.
Two 5-megapixel color sensors (2472 x 2064 pixels) ensure high stereoscopic resolution while providing the color information needed at close range with a wide field of view in applications with a working distance of 21 centimeters to 2 meters. The camera also features a fully integrated diffuse front LED to provide color neutral light to support 2D color image capture.
Robots utilize data captured by 3D cameras for precise part grabbing, assembly and welding.
3D cameras are used to check the quality, size, integrity or location of products, such as automotive parts detection, workpiece surface defect detection, parts modeling, etc.
3D camera for automated parcel sorting or cargo stacking, such as feeding, palletizing/unloading, warehouse picking
3D cameras are used for body scanning, surgical assistance, or for imaging in other medical applications.
High depth accuracy
Precision Measurement
Compact and lightweight
plug-and-play
Big Vision
Integrated Color Sensors
200W Projector
Industrial quality
The Ensenso B is the latest addition to the Ensenso camera series. It combines the advantages of all previous Ensenso series products in an extremely compact and sturdy housing that excels when shooting short-range objects.
These features make Ensenso B the ideal choice for applications in the robotics field that require high precision and reliability in tight spaces.
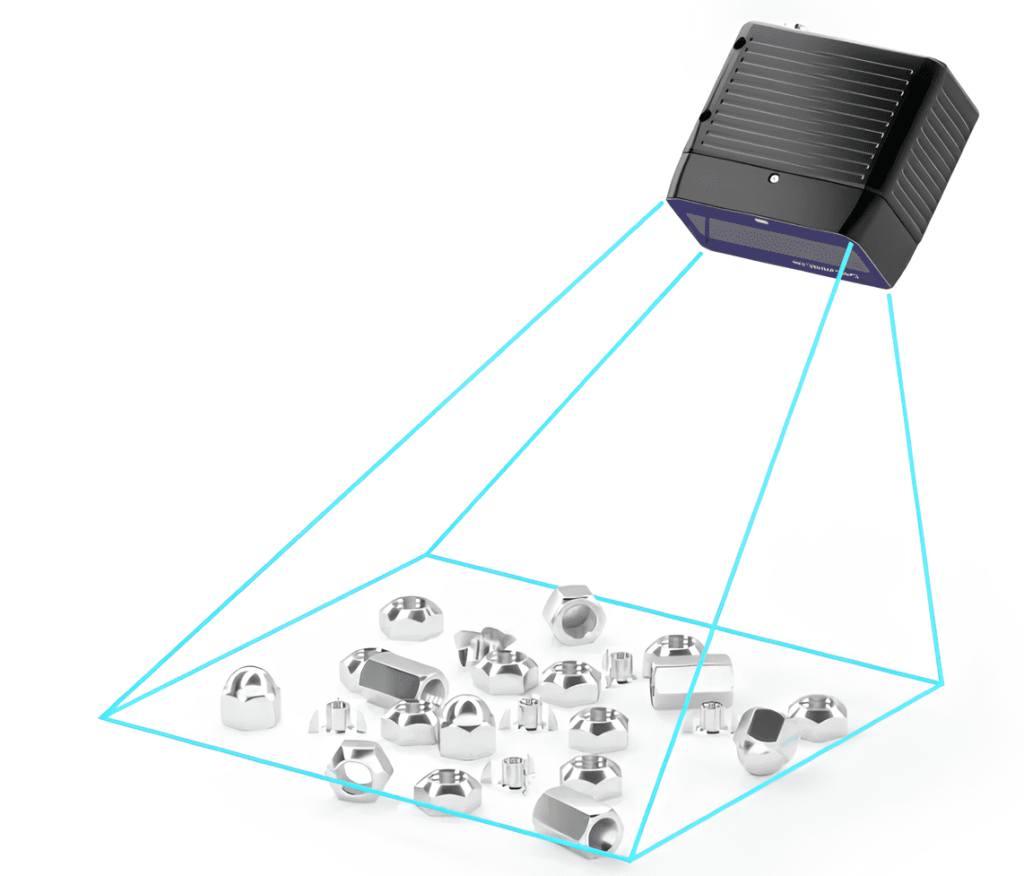
Fully integrated short-focus optics allow for the use of two 5 megapixel stereo cameras within a 21 centimeter object range.
Even at such a short distance, the Ensenso B covers a large 30 x 26 centimeter field of view and produces depth values with an accuracy of about 0.1 millimeters. The B-series lenses have a working distance of about 2 meters.
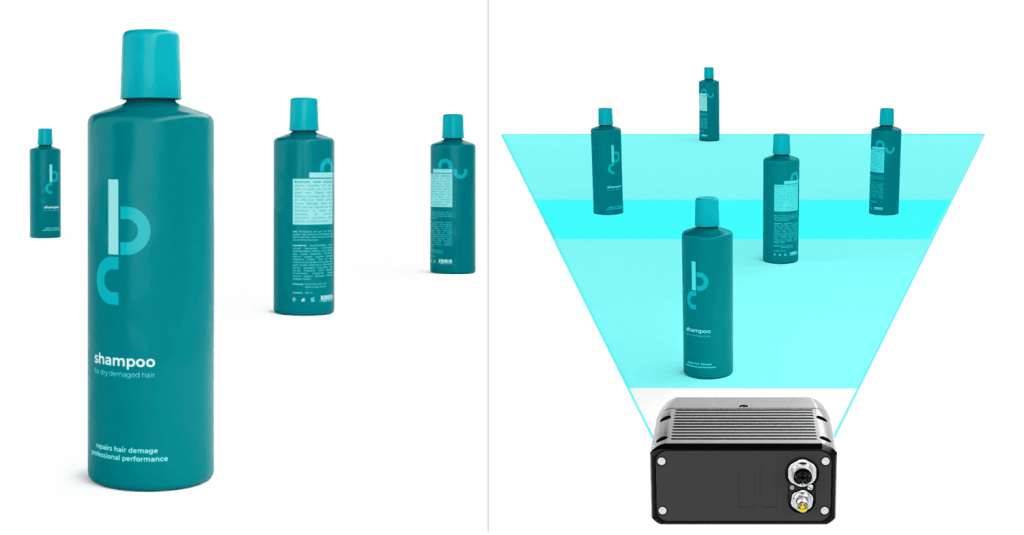
With its high depth of field, the Ensenso B ensures that objects in the working area are always in focus and perfectly sharp, even at different distances.
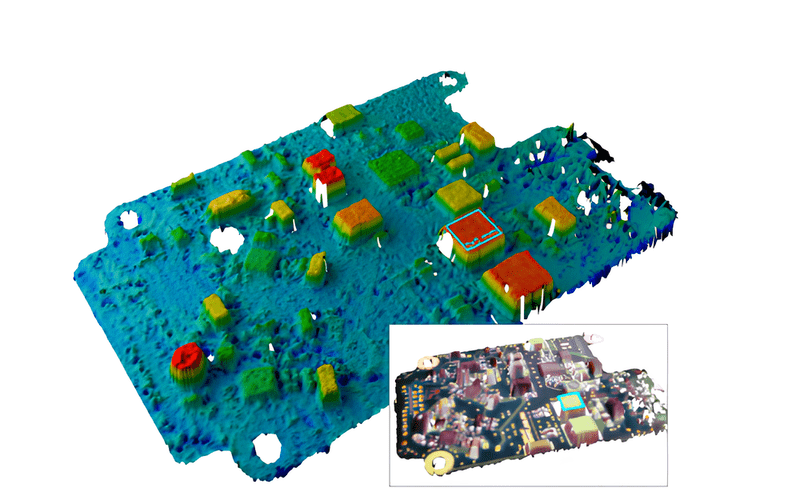
This feature supports two 5-megapixel Sony image sensors that produce stereoscopic images with extremely high pixel resolution at close range, providing highly detailed and complete raw data for point clouds.
With its compact design, dimensions of only 120 x 56 x 104 mm and IP65/67 protection, the Ensenso B is particularly space-saving and robust.
The integrated electronics and closed design greatly simplify wiring, which means that the Ensenso B works reliably even in challenging environments, such as when used on robot arms.
The B-Series cameras are equipped with FlexView 3rd Generation Multi-Image Acquisition Technology, which enhances parallax detail in still scene conditions.
The position of the pattern mask in the projection line can be converted into a progressive movement by a mechanical system using a piezoelectric actuator, creating textural variations in the representation of the object.
Acquiring multiple images of the same scene with different textures produces more image points, enhancing the resolution, and the matching algorithm uses all the captured images to compute an enhanced parallax map.
As a result, the camera captures image information with more detail, more precise object contours, significant noise reduction, and more reliable 3D data on tilted surfaces.
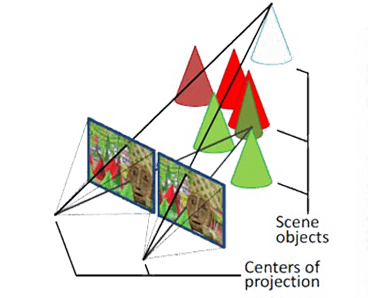
Utilizes the principle of stereoscopic vision that mimics the human eye Stereoscopic Vision
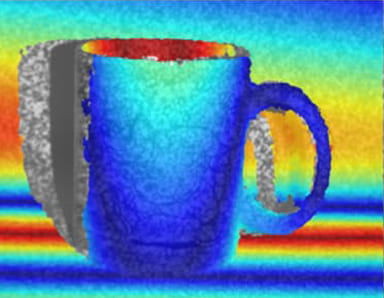
Projection helps to create the surface of the cup with fully balanced depth information
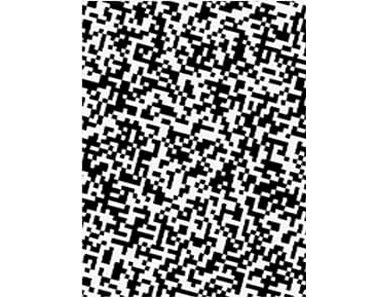
Cameras without FlexView Randomized point-and-shoot projection
Cameras using FlexView2 Enhanced accuracy and depth information quality
With the Ensenso SDK, the Ensenso N Camera Series cameras are easy to set up and operate.
In addition to providing easy-to-configure wizards and camera calibration support for 3D cameras, it also includes GPU-based image processing for faster 3D data processing.


Precise, robust, easy to use
Compact and rugged 3D camera system designed for use in harsh environmental conditions
Modular, local data processing capabilities
Performs 2D image matching operations directly on the camera side, and generates 3D point cloud data on the camera side for transfer to a computer.

Modularity allows for flexibility and adaptability to project needs.
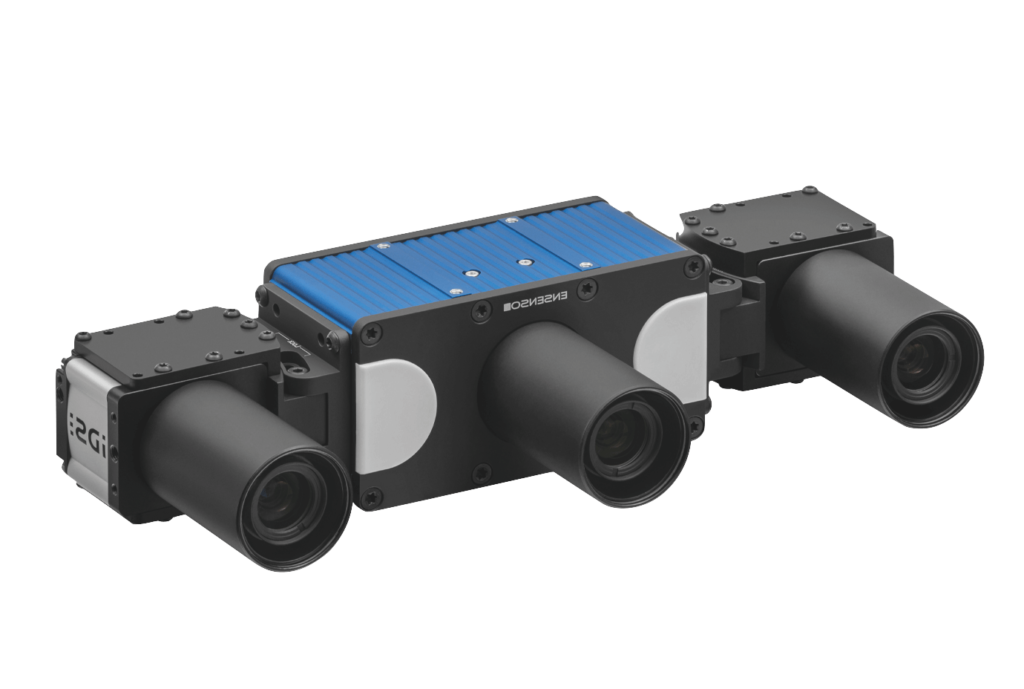
External lens, variable baseline, adjustable viewing angle, selectable lenses, 160w/500w high-resolution options available
Ultra compact, high precision depth, TOF principle
Utilizes AI's 3D laser dot-matrix pattern triangulation technology for multiple scenes and ultra-compact designs.
Technical support and paid services to drive your project to the limit.
S series camera with the other three series of different technical principles applied, S series application is TOF laser triangulation principle, mainly rely on the laser transmitter and receiver to collect distance information, fixed field of view, high frame rate, low price. The other three series are applied to the principle of binocular scattering, high precision, of which the X series compared to the N series, the lens external, you can easily adjust the angle of the two cameras to adjust the field of view, and stronger anti-sunlight performance. The XR series supports data processing on the camera side, which can release the computing pressure on the processor side of the industrial control machine and improve efficiency.
FlexView is our core patented technology. The principle of FlexView is to capture 8 or 16 pairs of images from the left and right cameras at the same time, and then integrate the results of the multiple pairs of images into a single image, resulting in a depth image with higher precision, reliability, and finer details.
We apply the principle of binocular plus projector projection random scattering texture, in the traditional binocular parallax calculation measurement principle, an additional projector active projection texture to the target object, when the target object is not enough features, the images collected by the two cameras can be accurately parallax calculation, and then get the depth image and 3D point cloud.
1. What is the content of the test? Does the size/shape vary? What is the size range? Can you provide pictures/video?
2. Is the test in motion or static? Outdoor or indoor? Can you provide a movie of the working environment?
3. How long does the camera work?
4. Precision requirements?
5. Need RGB information?
6. Is the visual processing software being developed in-house or by a third party?
There are 3 holes for PoE, one round hole for the power adapter, and two network cable connectors, the one labeled OUT connects to the camera's network port, and the one labeled IN connects to the control terminal (e.g., computer).
Open PC Control Panel->Network and Sharing Center->Change Adapter Settings->Select the right-click attribute of the Ethernet you just connected->Select IPv4->Assign IP address.
1. What is the content of the test? Does the size/shape vary? What is the size range? Can you provide pictures/video?
2. Is the test in motion or static? Outdoor or indoor? Can you provide a movie of the working environment?
3. How long does the camera work?
4. Precision requirements?
5. Need RGB information?
6. Is the visual processing software being developed in-house or by a third party?
