
虹科案例
【虹科方案】虹科 AR 遠程醫療解決方案 – 整合 AI 翻譯與遠程會診,推動跨國醫療合作
虹科 AR 遠程醫療解決方案整合醫療級 AR 智慧眼鏡、AI 即時翻譯與遠程會診技術,支援跨語言醫療溝通、臨床教學與國際醫療合作,推動智慧醫療流程數位化升級。

Lorem ipsum dolor sit amet, consectetur adipiscing elit.Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
Lorem ipsum dolor sit amet, consectetur adipiscing elit.Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
在虹科 GNSS 模擬器的設定介面中,系統提供了「高斯噪聲(Gaussian Noise)」配置選項,允許使用者在設定星座頻點後,依測試需求自由選擇是否啟用高斯噪聲疊加功能。在全球導航衛星系統(GNSS)的射頻模擬測試中,高斯白噪聲(AWGN)通常被視為模擬真實電磁環境的基準配置。然而,工程實踐證明,噪聲對接收機性能的影響並非線性單調關係。
針對此功能的實際應用場景及其對定位結果的影響,我們收到部分使用者反饋與疑問:「為什麼開啟噪聲後定位反而更穩?」「為什麼在弱訊號環境下啟用噪聲會導致丟星?」
因此,本文將深入解析高斯噪聲在 GNSS 模擬中的作用邏輯。
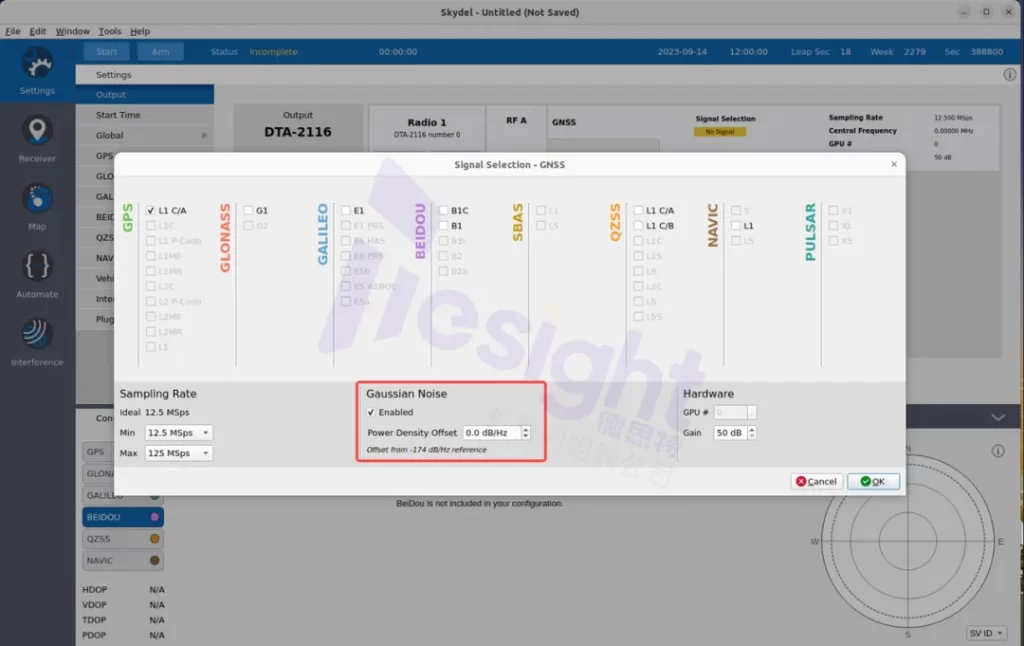
在理想數學模型中,衛星訊號是完美調制於特定頻率的 BPSK 序列;但在現實物理環境中,訊號不可避免地疊加了熱噪聲。虹科 GNSS 模擬器引入高斯噪聲,主要基於以下兩個必要性:
在實際測試中,噪聲與定位效果呈現複雜非線性關係,尤其在以下兩種極端場景中顯著。
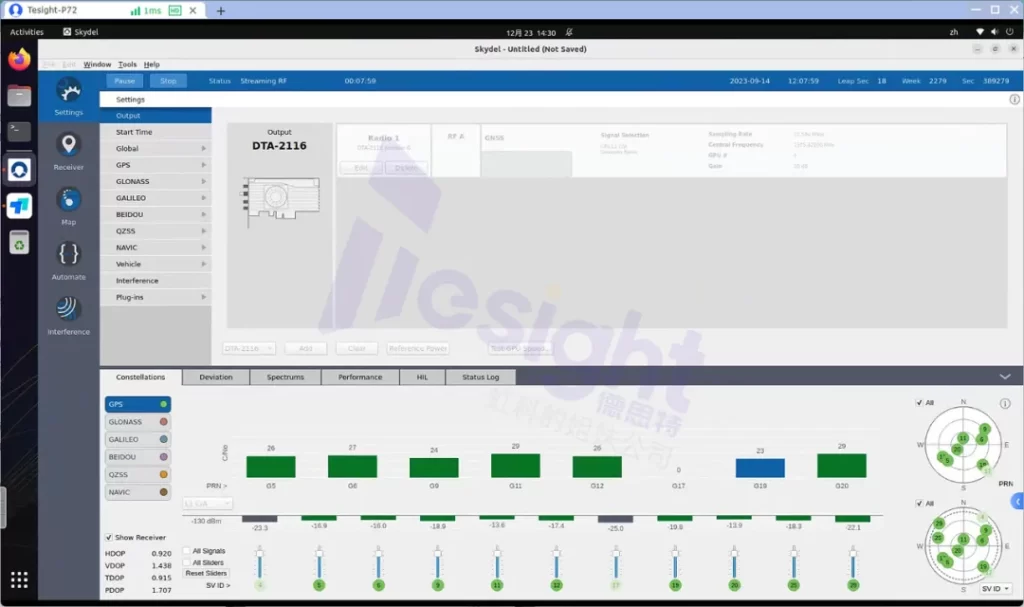
實測場景:選取靜態座標,啟用 GPS L1CA 進行模擬,分別添加/不添加高斯噪聲進行 10–15 分鐘 GNSS 模擬,並連接接收機觀測定位結果。
測試結果:
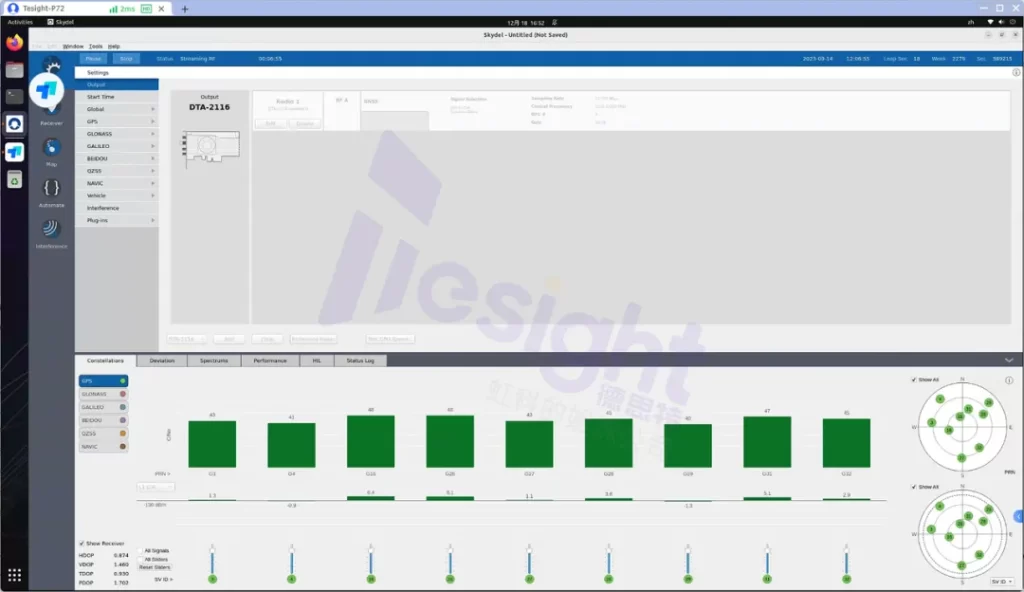
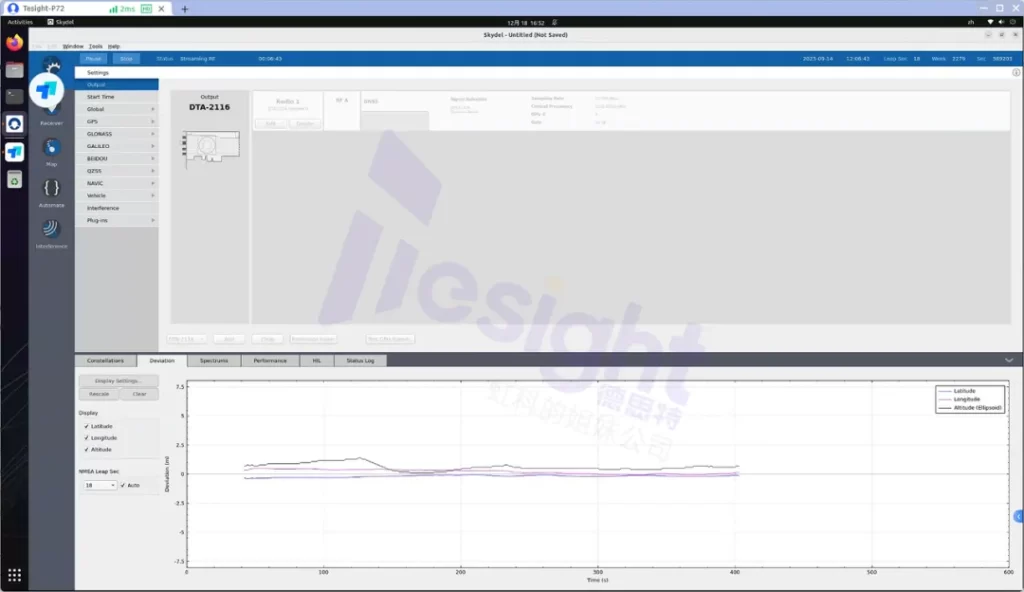
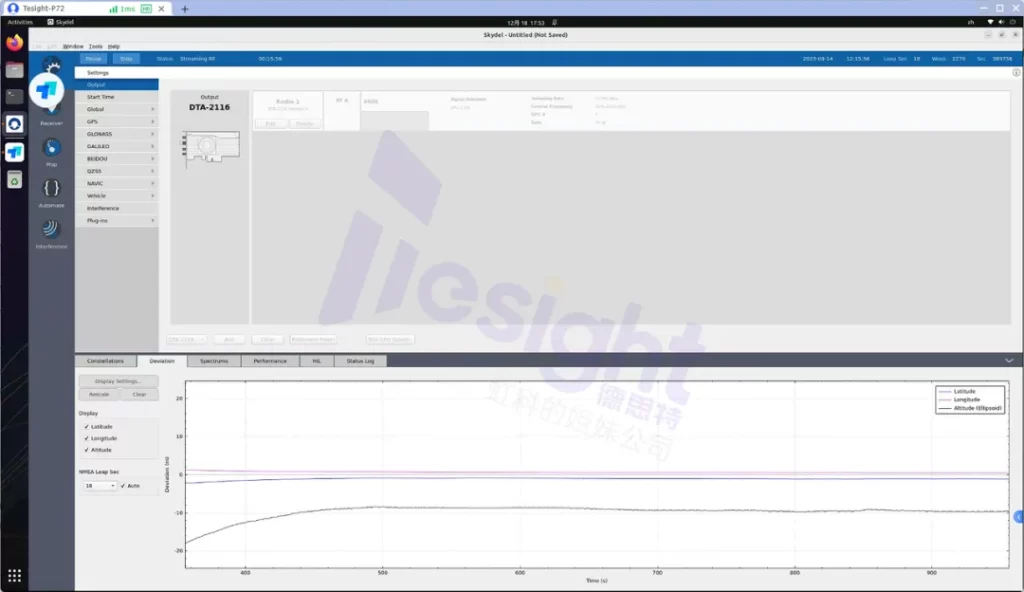
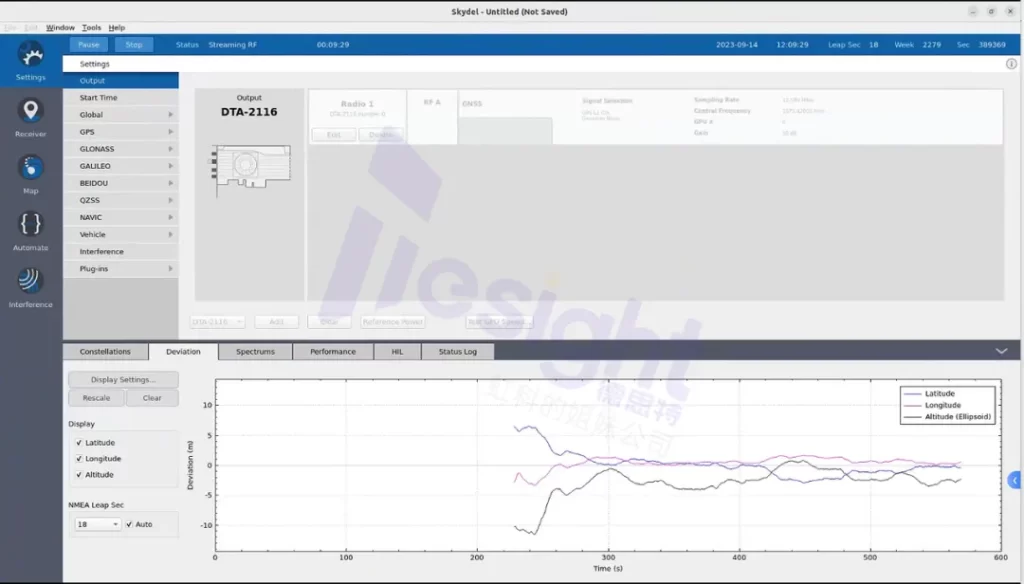
現象分析:在標準信號功率下,關閉模擬器噪聲雖可提升接收機信噪比,但定位收斂時間顯著延長,且高度存在系統性偏差。
原因解析:
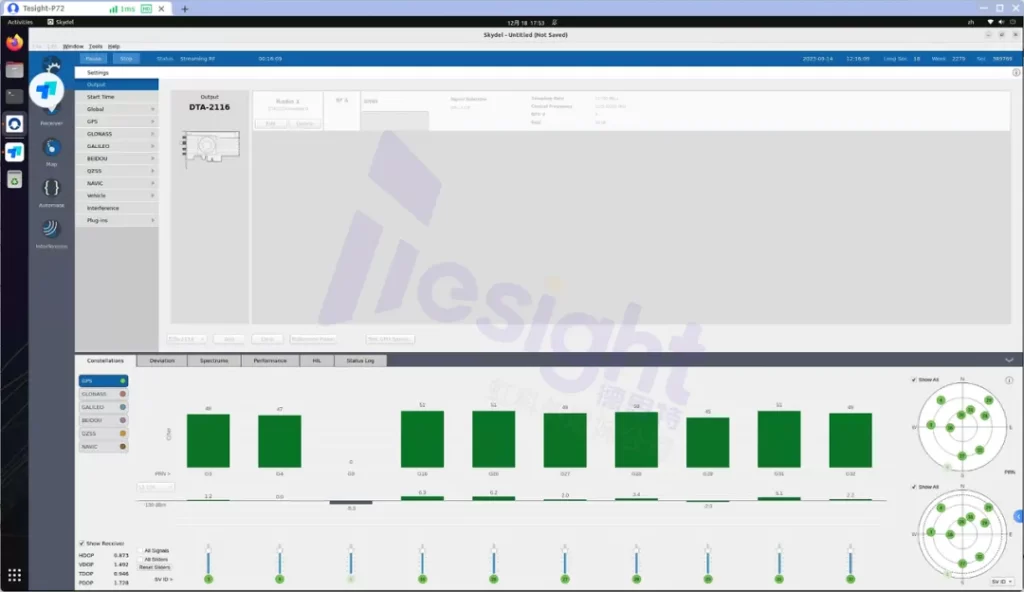
實測場景:靜態座標,啟用 GPS L1CA 模擬,外部添加 30dB 衰減,使輸出功率降至約 -140dBm,分別添加/不添加高斯噪聲進行 10–15 分鐘 GNSS 模擬,觀測接收機定位結果。
測試結果:
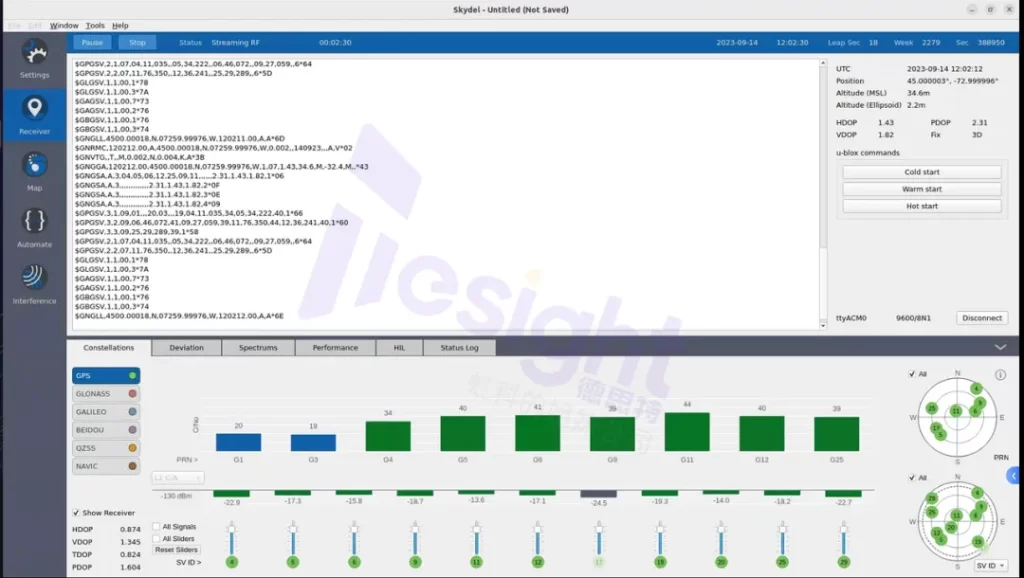

現象分析:在室內或遮擋環境下,添加高斯噪聲會降低信噪比,導致定位緩慢及誤差增大,功率再低可能造成接收機失鎖。
原因解析:
GNSS 模擬應遵循「分級測試」原則:
隨著 GNSS 技術演進,單純 AWGN 模擬已難滿足高端測試需求,未來應重點關注:
虹科 AR 遠程醫療解決方案整合醫療級 AR 智慧眼鏡、AI 即時翻譯與遠程會診技術,支援跨語言醫療溝通、臨床教學與國際醫療合作,推動智慧醫療流程數位化升級。

虹科 PCAN 卡應用於隧道挖掘設備電控系統,支援 CAN / CANopen / J1939 通訊,協助工程設備實現穩定資料傳輸、精準控制與高可靠性運作,適用於鑿岩台車與隧道施工設備。

KnowBe4 為企業應對香港《關鍵基礎設施保護條例》提供了化繁為簡的解決方案。面對第 24 條與第 25 條的嚴格挑戰,它將難以量化的「人為風險」轉變為可追蹤的實戰數據,不僅彌補了傳統評估的盲點,更為年度審核提供了證明控制措施「有效運作」的鐵證。透過自動化報告與持續演練,企業能在大幅降低安全風險的同時,輕鬆滿足監管要求,實現從「被動合規」到「主動防禦」的關鍵轉型。
