虹科案例
【虹科方案】可觀測性預算逼爆:Redis + Grafana 如何在 2 年內幫香港銀行省下 140 萬美金?
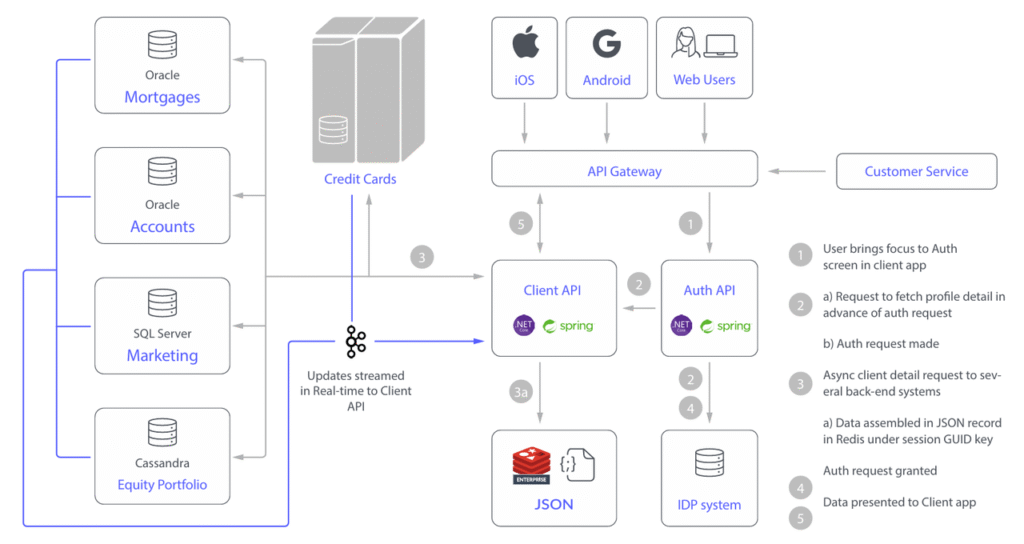
香港銀行受 Dynatrace 高昂授權成本困擾,依據香港金融管理局 TM‑E‑1 監管準則,採用 Redis+Grafana 搭建開源可觀測架構。以核心系統專屬 APM、其餘服務指標監控的分級策略,維持七成監控效能,兩年節省 140 萬美金監控開支,報表資料亦可滿足監檢需求。

Lorem ipsum dolor sit amet, consectetur adipiscing elit.Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
Lorem ipsum dolor sit amet, consectetur adipiscing elit.Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
隨著 L3 / L4 自動駕駛(Autonomous Driving)技術持續發展,車輛傳感器配置密度迅速增加,測試場景的複雜度亦呈指數級上升。與此同時,HIL(Hardware-in-the-Loop,硬件在環)測試正面臨多項關鍵挑戰,例如傳統方案仿真保真度不足,難以滿足高階自動駕駛感知系統需求;系統鏈路結構複雜導致升級成本較高;邊緣場景覆蓋不足與低延遲數據傳輸之間的矛盾日益明顯;以及現有測試架構難以支援高階智能駕駛系統的全生命週期測試與驗證。
針對 HIL 系統升級與新增部署的核心需求,虹科推出 高保真端到端 HIL 仿真測試解決方案。該方案以 aiSim 仿真平台(Simulation Platform)為核心,為外資車企、傳統汽車製造商、智能駕駛科技公司以及 Tier-1 供應商等整個汽車產業鏈客戶提供 低成本、高置信度及高效率的測試支援。憑藉 ISO 26262 ASIL-D 功能安全認證及大規模實際落地驗證,該方案已成為升級智能駕駛測試體系的重要選擇。
虹科 HIL 解決方案基於 開放且靈活的 XIL 架構(X-in-the-Loop),構建「高保真場景 – 多模態傳感器 – 高精度車輛動力學 – ECU 全鏈路交互」的完整閉環測試系統,其核心優勢主要體現在 軟件技術能力與系統兼容性設計。
該方案透過 單一高性能計算節點整合大規模場景生成、多傳感器協同仿真以及高精度車輛動力學建模,並創新採用「雙模注入路徑(Dual Injection Path)」實現傳感器原始數據直傳,有效避免硬件接口冗餘及調試複雜度,同時滿足多域控制器(Domain Controller)協同測試需求,大幅縮短系統開發週期。
在兼容性方面,平台原生支援 ASAM OpenDRIVE / OpenSCENARIO 行業標準,可無縫整合 ROS2、TROS、MATLAB / Simulink 等主流開發環境,同時適配 Continental、Sony、地平線(Horizon Robotics)、NVIDIA 等多品牌傳感器與高階域控平台。既有 HIL 系統升級時無需重新構建測試流程,即可實現平滑過渡。
在算力方面,系統採用 多 GPU 並行架構與多節點部署模式,可穩定支援 12 Camera + 9 Radar + 1 LiDAR 及以上高密度傳感器配置的仿真需求,滿足多源感知融合測試場景,使複雜場景的並行測試效率提升 50% 以上。
該方案核心軟件 aiSim 是全球首個通過 ISO 26262 ASIL-D 認證的仿真工具,其技術能力為智能駕駛測試提供全面支援。

aiSim 融合 Rasterization(光柵化)、Ray Tracing(光線追蹤)及 NeRF / 3DGS(3D Gaussian Splatting)等多種渲染技術,並透過自主研發 GGSR 通用高斯潑濺渲染器優化 RayTracing 傳感渲染效果,有效解決大視角(FOV)鏡頭一致性問題,同時高度還原雨雪天氣反射衰減及雷達多徑效應等環境互動效果。其多目標檢測 Recall 值達 64.68%,接近真實道路測試水平。
透過 PCIe DMA(Direct Memory Access)直接記憶體存取技術,系統可實現 GPU 至注入板卡 ≤1ms 的低延遲傳輸。同時 40Gbit/s 通道帶寬可支援 4K 高解析度傳感器數據傳輸,在光柵化渲染模式下穩定輸出 30FPS,在光線追蹤模式下亦可流暢運行 14FPS(持續優化中)。
平台支援 AutoGI 生成式場景泛化與 Log2World 自動場景重建,並兼容 Euro NCAP 法規測試場景及 Corner Case 邊緣場景提取。透過 拉丁超立方抽樣(Latin Hypercube Sampling)與貝葉斯自適應算法,有效提升測試覆蓋率與邊緣場景探索效率。
系統內建高保真 Camera、LiDAR、Radar、GNSS 及 Ultrasonic 傳感器模型,提供 GT 真值模式與物理級仿真模式,並支援鏡頭畸變、動態模糊、點雲反射率等細節參數設定。車輛動力學模型覆蓋 2D / 2D3 / 3D 模型及拖車場景,可滿足多車型及多測試場景需求。
該 HIL 仿真方案可協助客戶在 成本、性能與安全性之間取得平衡。
在 成本優化方面,透過軟件架構創新及硬件資源高效利用,相比傳統方案整體測試成本可降低 約 30%,同時避免因硬件迭代帶來的重複投資,使新部署與系統升級均具備更高性價比。
在 測試置信度方面,核心軟件 aiSim已通過 ISO 26262 ASIL-D 功能安全認證。車道線檢測誤差標準差為 0.33(真實場景為 0.31),並透過 Kolmogorov-Smirnov 檢驗與 KL 散度等多維度驗證指標,確保仿真結果與真實世界高度一致。
在 系統適配性方面,方案支援 SiL / MiL / HiL 全流程測試,從算法快速迭代到系統級驗證可無縫銜接,並可靈活切換測試模式,以適配自動駕駛系統開發的整個生命週期。
在 工程成熟度方面,該方案已完成 2000+ 小時實測標定,兼容 NI PXI 等主流硬件平台,並支援 CAN / CAN FD 及 Ethernet(1000BASE-T1 / 100BASE-T1)等多種通信協議,部署後即可穩定運行。
目前該 HIL 仿真方案已在多家頭部企業落地應用,同時 國產車輛動力學聯合仿真 HiL 台架亦已成功搭建,典型案例包括:
NVIDIA Hyperion 8.1 L3 閉環 HiL 項目
透過多節點分佈式部署,支援 12 Camera + 9 Radar + 1 LiDAR 傳感器配置,並透過 GMSL / Ethernet 接口實現傳感器數據注入,滿足高階自動駕駛系統的全場景測試需求。
地平線 TROS 集成方案
系統內建動力學模型,透過 Ethernet + Proto 協議實現低延遲通信,適配 ADCU_J6E 域控平台,完成車道保持與自適應巡航功能驗證。
國產車輛動力學聯合仿真 HiL 台架
整合 德思特 GNSS 模擬器(1000Hz 迭代率、5ms 延遲)提供物理 GNSS 信號仿真,支援整車動力學特性驗證。
Qualcomm L2+ 智駕系統測試
透過 4 Camera + 5 Radar配置及雙 GPU 並行仿真,覆蓋高速與城市道路場景,完成 AEB、ACC等核心功能的閉環測試。
總體而言,虹科 HIL 仿真解決方案以軟件能力為核心驅動,突破了傳統測試架構對硬件的依賴限制。該方案既能支援現有系統升級的平滑過渡,也為新部署提供對標行業領先水平的成熟方案。
依託 aiSim 的技術前瞻性與工程化落地能力,虹科可協助整個智能駕駛產業鏈客戶在系統開發與測試過程中實現 成本、效率與置信度的全面提升。
香港銀行受 Dynatrace 高昂授權成本困擾,依據香港金融管理局 TM‑E‑1 監管準則,採用 Redis+Grafana 搭建開源可觀測架構。以核心系統專屬 APM、其餘服務指標監控的分級策略,維持七成監控效能,兩年節省 140 萬美金監控開支,報表資料亦可滿足監檢需求。
專為汽車電子研發打造!虹科 PSI5 模擬器完整支援 ECU 仿真、Sensor 測試與 HiL 模擬,全面覆蓋安全氣囊及底盤控制場景,有效縮短 30% 開發週期。立即查看 B2B 專業測試方案!

專為汽車電子研發打造!虹科 PSI5 模擬器完整支援 ECU 仿真、Sensor 測試與 HiL 模擬,全面覆蓋安全氣囊及底盤控制場景,有效縮短 30% 開發週期。立即查看 B2B 專業測試方案!
