虹科案例
【虹科方案】 SimData高保真虛擬數據集方案:基於aiSim的自動駕駛感知訓練
虹科推出SimData高保真虛擬數據集,依託aiSim仿真平台,完美兼容nuScenes格式。為自動駕駛感知算法、LiDAR、BEV模型提供高質量多模態訓練數據,有效解決極端場景(Edge Cases)採集難題。立即點擊了解構建流程與實測效果!

Lorem ipsum dolor sit amet, consectetur adipiscing elit.Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
Lorem ipsum dolor sit amet, consectetur adipiscing elit.Ut elit tellus, luctus nec ullamcorper mattis, pulvinar dapibus leo.
隨著 ADAS(高級駕駛輔助系統) 功能向更進階級別演進,複雜的 ECU 對測試驗證提出了嚴峻挑戰。傳統的硬件在環 (HiL) 測試系統往往伴隨著高昂的採購成本與僵化的部署流程。本文將透過真實案例,剖析如何利用虹科 PCAN-USB Pro FD 介面卡,以標準化的硬件和靈活的軟件方案打破測試瓶頸,實現具備高性價比且前瞻性的雷達 ECU 驗證。
某德國領先的汽車供應商需要高效且精準地完成新型雷達 ECU 的測試。作為自適應巡航控制(ACC)和緊急煞車控制(NCC)等駕駛輔助系統的製造商,該企業必須滿足極高的安全性與可靠性要求。因此,這些安全關鍵型系統必須在開發初期階段進行全面測試。同時,測試系統需要滿足高靈活性、高性價比的要求,且必須支援多個團隊並行使用。

傳統的硬件在環(HiL)測試台採購與運行成本極高,且數量十分有限,無法支援多個團隊並行使用。此外,由於其系統具備封閉性與複雜性,技術適配難度大,工程師很難進行臨時性的調整或引入新的測試思路。開發人員無法在開發早期達到所需的測試深度,這既影響了輔助系統的安全性驗證,也拖慢了整體的研發節奏,嚴重影響了駕駛輔助系統的上市速度 (Time-to-market)。
為克服上述痛點,該企業基於標準化硬件和靈活可擴充的軟件,成功開發了一套全新的硬件在環 (HiL) 系統。該方案以 虹科 PCAN-USB Pro FD 介面卡 為核心——作為雷達 ECU 與測試 PC 之間的通訊橋梁,透過 USB 將雷達 ECU 直接連接至測試 PC。

PC 在 Windows 系統下運行專門開發的測試軟件,模擬加速、煞車、轉向等典型駕駛操作,以及自適應巡航控制系統的功能。相應的訊號透過 CAN FD 總線 傳輸至雷達 ECU,同時由 DBC 解析器確保訊號解讀的絕對準確性。
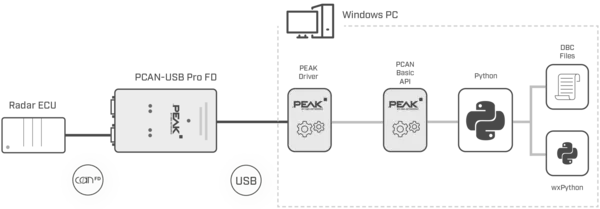
開發人員藉助免費的 PCAN-Basic API 在 Python 中實現自動化測試序列,圖形介面則可即時視覺化顯示結果並支援便捷操作。最終構建的模擬環境,能讓開發人員在各種運行工況下精準測試雷達 ECU 的性能;且相比傳統 HiL 系統,其成本顯著降低、靈活性大幅提升。
虹科推出SimData高保真虛擬數據集,依託aiSim仿真平台,完美兼容nuScenes格式。為自動駕駛感知算法、LiDAR、BEV模型提供高質量多模態訓練數據,有效解決極端場景(Edge Cases)採集難題。立即點擊了解構建流程與實測效果!

如何為醫藥冷鏈選擇合適的溫度數據記錄儀?本文深度對比一次性與多次使用(可重複)Data Logger 的優缺點,結合 GMP/GDP 合規標準,助香港與東南亞藥企與物流商優化供應鏈溫控管理,降低出海合規風險。點擊了解專家選型方案!

虹科攜手中華電信導入 Vuzix M400 企業級 AR 智能眼鏡,助攻偏遠地區遠程醫療升級!透過「第一視角」與免提協作打破地域限制,為 B2B 醫療機構、照護單位加速數碼轉型與智慧醫療應用落地。點擊了解完整 POC 概念驗證方案。
